Chapitre 2
Méthodes et outils
Au cours de ce chapitre, je présenterai les deux outils fondamentaux utilisés durant ma thèse. Un
code numérique d’intégration des équations du mouvement, en application directe du formalisme
hamiltonien présenté précédemment, et l’Analyse en Fréquence.
Dans une première partie, je discuterai d’abord des motivations qui m’ont conduit à me lancer
dans l’écriture d’un code numérique. Ensuite, je donnerai une brève description des
différentes philosophies et méthodes employées et expliquerai leurs domaines de validité.
Je m’attarderai plus particulièrement sur l’avantage des nouvelles méthodes (schéma
symplectique, algèbre de Lie) utilisées dans le monde des accélérateurs. Bien que ces méthodes
soient aujourd’hui très répandues aux Etats-Unis, elles ont plus de mal à s’établir en
Europe.
Je présenterai alors une nouvelle classe d’intégrateurs symplectiques à pas tous positifs développée
par Jacques Laskar (2000). Puis, je l’appliquerai aux Hamiltoniens décrivant chacun des
principaux éléments magnétiques d’un accélérateur. Enfin, je donnerai une comparaison avec
l’intégrateur de Ruth (1983), intégrateur symplectique le plus utilisé pour les machines à
électrons.
Après avoir intégré les équations du mouvement, la dynamique des différentes machines à
rayonnement synchrotron sera étudiée au moyen de l’Analyse en Fréquence. L’Analyse en
Fréquence est l’outil central de mon travail de thèse. Je commencerai, dans la seconde partie de ce
chapitre, par décrire la méthode sans noyer le lecteur dans des détails trop techniques. C’est un
outil extrêmement puissant qui a été développé par Jacques Laskar initialement pour étudier la
dynamique du Système Solaire. Avant de l’appliquer à la dynamique des accélérateurs (voir le
chapitre 3), je présenterai quelques résultats pédagogiques sur le pendule rigide et l’application
d’Hénon. Ces deux applications à un et deux degrés de liberté auront la particularité de permettre
au lecteur de pouvoir lire plus simplement les cartes en fréquence des accélérateurs ; de plus, ils me
permettront de présenter brièvement quelques résultats généraux sur les résonances et la stabilité
des systèmes dynamiques.
2.1 Réalisation d’un intégrateur symplectique
2.1.1 Introduction
L’écriture d’un code d’intégration des équations du mouvement est arrivée tardivement dans mon
travail de thèse. Dans le langage accélérateur, on parle souvent de code de tracking. De multiples
raisons expliquent ce choix :
Pour commencer, de nombreux codes de tracking avaient déjà été écrits. Par exemple le
programme MAD développé continuellement au CERN [50] est largement employé par
la communauté des physiciens des accélérateurs. Cependant, généralement à chaque
accélérateur correspond un ou plusieurs codes spécifiques. Ces codes sont modifiés, améliorés
constamment et localement pour permettre de prendre en compte de nouveaux phénomènes
physiques, de nouveaux éléments magnétiques. Très rapidement, le résultat peut être un code
volumineux qui, souvent, est adapté à des tâches diverses et variées, allant de la conception
d’un accélérateur à l’optimisation de sa dynamique et de ses performances. Le groupe
théorie faisceau d’une machine peut être divisé schématiquement en deux sous-groupes :
une personne spécialiste et développeur des codes utilisés par les membres du second
groupe.
J’ai découvert le monde des accélérateurs au sein de l’équipe du Projet SOLEIL, il
y a bientôt trois ans. Lorsque j’ai commencé à étudier la dynamique de SOLEIL, on
m’a donné une description de la maille théorique de l’anneau de stockage et le manuel
d’utilisation du logiciel BETA [93] pour faire le tracking. Le même processus s’est répété pour
l’étude de l’Advanced Light Source avec le code DESPOT [42] (ici il n’y a pas de manuel
d’utilisation).
Donc dans un premier temps, les codes d’intégrations se sont résumés à des boîtes noires
« censées » donner les bons résultats. De plus, l’écriture d’un code de tracking est considérée
comme une tache ardue par les utilisateurs. Mon directeur de thèse, astronome, prétendait le
contraire après avoir travaillé avec les physiciens de l’ALS (1993). Initialement, je ne l’ai pas crû.
Puis, en travaillant sur différentes sources de lumières (cf. chapitre 3), j’ai dû presque utiliser un
code de tracking différent par machine. J’ai été confronté à des problèmes de modélisation, à des
incompatibilités entre codes. Plus préoccupant, les codes peuvent donner des résultats
complètement différents aux grandes amplitudes du mouvement et parfois même pour les
paramètres linéaires. Le temps de calcul peut également être du simple au double suivant les
méthodes utilisées.
Enfin, à ces motivations doivent encore s’en ajouter deux autres.
Premièrement à ma connaissance, il n’existe pas dans la communauté
française
de code de tracking optimisé et adapté à l’étude de la dynamique à long terme des accélérateurs
d’électrons. Deuxièmement, l’équipe Astronomie et Systèmes Dynamiques est un lieu
regroupant toutes les compétences nécessaires pour l’écriture d’un tel intégrateur. Ces
dernières années, plusieurs intégrateurs y ont d’ailleurs été développés pour la Mécanique
Céleste.
Le but principal de ce travail est donc d’obtenir un code de calcul efficace permettant d’intégrer
le mouvement d’une particule dans un élément magnétique puis dans l’accélérateur
complet. L’intégrateur doit être à la fois rapide pour réaliser des études à long terme
(plusieurs millions de tours), précis pour étudier finement la dynamique et valide à grande
amplitude pour prendre correctement en compte l’effet des éléments multipolaires. Dans la
première version du code, la modélisation des défauts (déplacements, rotations des éléments
magnétiques) ne nous intéresse pas ; cependant leur implémentation ne poserait aucune
difficulté.
Je vais commencer par décrire les deux grandes approches selon lesquelles les codes numériques
de tracking sont écrits. Mais tout d’abord, définissons les notions d’information locale et globale
dans un accélérateur (cf. Forest et Hirata, 1992 et Forest, 1998).
Une quantité est appelée locale si elle dérive d’un élément magnétique indépendamment de sa
position dans l’anneau et de l’anneau lui-même : intégration d’une particule à travers l’élément, le
système de coordonnées de référence, la déviation de l’orbite nominale, le champ magnétique ou
l’enveloppe du faisceau.
Une quantité est dite globale si elle ne peut être déduite qu’à partir de la connaissance de
l’anneau complet : l’orbite fermée, les nombres d’ondes, les fonctions de Twiss ou l’émittance
d’équilibre.
2.1.2 Ancienne approche
Dans l’ancienne approche, on définit un seul et unique système de référence (coordonnées
curvilignes), le champ électromagnétique est alors développé dans ce système pour obtenir
l’expression, soit d’un Hamiltonien global, soit d’équations newtoniennes globales. Les équations du
mouvement sont exprimées de manière à permettre simultanément le tracking et le calcul
des quantités globales caractérisant l’anneau. Bien que possible, cette approche devient
très compliquée avec l’augmentation de la complexité et de la taille d’un anneau de
stockage.
Les solutions ( ) du mouvement sont obtenues en effectuant un développement de Taylor des
équations du mouvement autour d’une orbite dite de référence — typiquement l’orbite fermée qui
doit préalablement avoir été calculée — ; cependant son obtention est pénible à partir
de l’ordre 3. L’expression générale entre le vecteur position initial (
) du mouvement sont obtenues en effectuant un développement de Taylor des
équations du mouvement autour d’une orbite dite de référence — typiquement l’orbite fermée qui
doit préalablement avoir été calculée — ; cependant son obtention est pénible à partir
de l’ordre 3. L’expression générale entre le vecteur position initial ( ) et final (
) et final ( )
s’écrit :
)
s’écrit :
 | (2.1) |
où  représente l’orbite fermée,
représente l’orbite fermée,  l’optique linéaire,
l’optique linéaire,  , les aberrations optiques
d’ordre un et deux (voir Brown, 1982). L’optique linéaire est obtenue en tronquant la série de
Taylor au premier ordre. Les éléments magnétiques sont modélisés par des matrices, puis selon les
besoins, on inclut les termes d’ordres supérieurs. Généralement, le développement est arrêté au
second ordre pour permettre d’inclure les éléments multipolaires qui sont presque toujours exprimés
sous forme de lentilles minces, en particulier les inévitables hexapôles (voir par exemple les logiciels
BETA [93], TRANSPORT [50]).
, les aberrations optiques
d’ordre un et deux (voir Brown, 1982). L’optique linéaire est obtenue en tronquant la série de
Taylor au premier ordre. Les éléments magnétiques sont modélisés par des matrices, puis selon les
besoins, on inclut les termes d’ordres supérieurs. Généralement, le développement est arrêté au
second ordre pour permettre d’inclure les éléments multipolaires qui sont presque toujours exprimés
sous forme de lentilles minces, en particulier les inévitables hexapôles (voir par exemple les logiciels
BETA [93], TRANSPORT [50]).
Cette approche est historiquement la première a avoir été développée (Courant et Snyder, 1958
et Bruck, 1966). Initialement, elle été vouée à la conception des accélérateurs, au tracking sur
quelques tours, afin de calculer les grandeurs linéaires et d’analyser la stabilité du mouvement au
premier ordre. Une des hypothèses fondamentales utilisées est l’approximation des petits angles ou
approximation dite des grandes machines, hypothèse qui rend les dipôles et quadripôles linéaires (et
les sections droites : « éléments sans champ »).
Cette méthode a l’avantage de permettre d’obtenir simplement et rapidement les
informations globales de l’anneau (e.g. fonctions de dispersion, orbite fermée, nombres
d’ondes, chromaticités, fonctions de Twiss). Autre avantage, le temps de calcul de
l’ouverture dynamique (paramètre essentiel pour l’optimisation) est suffisamment
faible (quelques minutes) pour permettre de tester un grand nombre d’optiques de la
machine.
Je voudrais insister sur le fait qu’il n’existe pas de logiciel de calcul adapté à tous les besoins
rencontrés dans le monde des accélérateurs : chaque code de calcul est écrit dans un
cadre très précis (développement au voisinage de l’orbite fermée, approximation des
grandes machines, conception de machines, optimisation d’optiques), cadre qui trop souvent
est oublié par leurs utilisateurs. De plus, il faut ajouter que les performances exigées
aujourd’hui pour les accélérateurs ne sont plus du tout les mêmes qu’il y a vingt ou trente
ans. A l’époque, les machines étaient très linéaires, avaient de faibles acceptances en
énergie et dynamique ; aujourd’hui, pour une machine comme SOLEIL, on exige des
performances extrêmes — acceptance en énergie de six pour cent, grande ouverture
dynamique, durée de vie de plus de dix heures, haute brillance, faible émittance, nombreux
dispositifs d’insertion — et tout cela avec des composantes multipolaires de plus en plus
fortes, rendant l’optimisation de plus en plus délicate du fait des nombreuses résonances
induites.
Après cette parenthèse, nous convenons qu’il serait dangereux d’utiliser un code hors de son
cadre. En particulier, si l’utilisation d’un développement de Taylor est adapté pour les LINAC (que
la particule ne traverse qu’une seule fois), il serait illusoire de vouloir utiliser aujourd’hui
cette approche pour une étude fine de la dynamique et pour des études à long terme, et
qui plus est, à grande amplitude (cf. infra Super-ACO, une machine à faible rayon de
courbure). De par la non symplecticité de la troncature de la série de Taylor (en général),
lorsque la trajectoire d’une particule est intégrée sur plusieurs milliers de tours pour des
électrons ou plusieurs dizaines de millions de tours pour des protons, on observe des
amortissements artificiels conduisant à des orbites spirales et à la présence de résonances
factices.
2.1.3 Approche moderne
La méthode dite moderne consiste à découpler la simulation de l’analyse, i.e. séparer la
construction de l’application de premier retour et de l’intégrateur (problèmes locaux) de l’analyse
des grandeurs caractéristiques déduites de l’application de premier retour (problèmes globaux) ;
cette séparation doit avoir lieu autant du point de vue de la conception que du point de vue de la
programmation.
2.1.3.1 Présentation
La construction d’un code de tracking est un problème entièrement local : chaque élément est défini
par un Hamiltonien local dont le système de référence est choisi à partir de considérations
purement géométriques (formes et symétries du champ magnétique). Suivant le type d’élément
magnétique telles ou telles considérations seront privilégiées, considérations qui peuvent être
contradictoires d’un élément à l’autre. Il faut donc trouver une méthode pour relier les éléments les
uns avec les autres : c’est l’approche LEGO si l’on reprend la terminologie de Forest et Hirata (1992).
Comme nous l’avons déjà dit, le choix du système de coordonnées est entièrement libre ;
cependant deux grandes familles de blocs sont à distinguer : le bloc courbe et le bloc
rectiligne.
- Le bloc rectiligne est un bloc avec deux faces parallèles séparées d’une distance
 ,
sur chacune desquelles est attaché un système local de coordonnées cartésiennes
(Fig. 2.1-a). Les repères sont les mêmes pour les deux faces et sont reliés par une ligne
droite. Ce type de bloc peut être utilisé pour la description des quadripôles, hexapôles,
2n-pôles, wiggler.
,
sur chacune desquelles est attaché un système local de coordonnées cartésiennes
(Fig. 2.1-a). Les repères sont les mêmes pour les deux faces et sont reliés par une ligne
droite. Ce type de bloc peut être utilisé pour la description des quadripôles, hexapôles,
2n-pôles, wiggler.
- Le bloc courbe est un bloc pour lequel les axes verticaux
 des repères entrant
et sortant sont parallèles alors que les axes horizontaux
des repères entrant
et sortant sont parallèles alors que les axes horizontaux  se coupent suivant un
angle
se coupent suivant un
angle  (Fig. 2.1-b). Les origines des deux repères sont reliées par un arc de cercle de
rayon
(Fig. 2.1-b). Les origines des deux repères sont reliées par un arc de cercle de
rayon  . Un tel bloc a pour premier but de courber la trajectoire d’une particule d’un
angle d’environ
. Un tel bloc a pour premier but de courber la trajectoire d’une particule d’un
angle d’environ  degrés. Ce bloc sera plus particulièrement adapté à la description
d’aimants de courbure (aimant dipolaire secteur ou droit).
degrés. Ce bloc sera plus particulièrement adapté à la description
d’aimants de courbure (aimant dipolaire secteur ou droit).
2.1.3.2 Le flot d’un système
Le but des blocs de base est de permettre de construire et calculer l’application qui transporte une
particule de la face d’entrée (i) à la face de sortie (f) ; cette application,  , est généralement
appelée application de transfert ou flot de l’élément :
, est généralement
appelée application de transfert ou flot de l’élément :
 | (2.2) |
Remarquons qu’un élément magnétique pourra être composé de plusieurs blocs élémentaires.
L’élément physique sera donc défini par le couple bloc (rectiligne, courbe) et un modèle qui donne
l’application de transfert à travers l’élément.
Donnons dès à présent, deux propriétés essentielles du flot. Soit deux éléments notés (1) et (2),
et  est le flot associé à (1) et
est le flot associé à (1) et  celui associé à (2) alors le flot résultant pour le
système (1–2) est simplement l’application composée :
celui associé à (2) alors le flot résultant pour le
système (1–2) est simplement l’application composée :
 | (2.3) |
Pour un système autonome qui possède une périodicité (l’anneau), on est amené à calculer le flot
de l’anneau complet  sur
sur  tours de circonférence
tours de circonférence  , alors :
, alors :
 | (2.4) |
Cette approche est bien locale, chaque élément est modélisé par un Hamiltonien exprimé dans les
coordonnées naturelles (pour son intégration).
2.1.3.3 Intégrateur symplectique ab ovo
Nous allons introduire quelques notions d’algèbre de Lie et définir l’intégration symplectique (voir
Lectures on nonlinear orbit dynamics de A. Dragt (1982) pour une introduction à l’algèbre de Lie
appliquée au monde des accélérateurs).
Soit  le Hamiltonien d’un système autonome à
le Hamiltonien d’un système autonome à  degrés de liberté et
degrés de liberté et  le
vecteur de coordonnées et moments généralisés et
le
vecteur de coordonnées et moments généralisés et  , la coordonnée indépendante. Alors les
équations de Hamilton sont :
, la coordonnée indépendante. Alors les
équations de Hamilton sont :
 | (2.5) |
Si on définit les crochets de Poisson de deux fonctions f et g des variables  par :
par :
 | (2.6) |
alors les équations 2.5 peuvent se réécrirent de manière plus concise :
 | (2.7) |
avec  l’opérateur différentiel défini par
l’opérateur différentiel défini par  . On peut alors intégrer formellement
les équations du mouvement pour des conditions initiales données
. On peut alors intégrer formellement
les équations du mouvement pour des conditions initiales données  :
:
 | (2.8) |
En pratique, la difficulté est l’évaluation du terme  de l’équation 2.8, car bien qu’étant une
série convergente, la convergence est souvent lente et nécessite l’évaluation d’un grand nombre
de termes dépendant du pas de temps
de l’équation 2.8, car bien qu’étant une
série convergente, la convergence est souvent lente et nécessite l’évaluation d’un grand nombre
de termes dépendant du pas de temps  et de la forme de
et de la forme de  . Le principe de base
utilisé pour intégrer l’équation 2.7 consiste à approximer l’opérateur
. Le principe de base
utilisé pour intégrer l’équation 2.7 consiste à approximer l’opérateur  de manière
symplectique.
de manière
symplectique.
Formellement, la solution exacte du système 2.8 est symplectique : le flot hamiltonien,
transportant le vecteur de l’espace des phases  du temps
du temps  au temps
au temps  le
long d’une trajectoire du système d’énergie
le
long d’une trajectoire du système d’énergie  , conserve exactement la 2-forme
symplectique :
, conserve exactement la 2-forme
symplectique :
 | (2.9) |
Une méthode d’intégration vérifiant cette propriété est appelée intégrateur symplectique. Un
développement de Taylor à l’ordre  ne vérifie généralement ni la condition de symplecticité 2.9 ni
la conservation de l’énergie. Remarquons qu’idéalement, on souhaiterait également que l’énergie soit
exactement conservée, cependant Ge et Marsden (1988) ont montré qu’il n’existe pas en général de
tel schéma d’intégration pour un Hamiltonien non intégrable. Cependant, l’intégrateur
symplectique conserve exactement le Hamiltonien
ne vérifie généralement ni la condition de symplecticité 2.9 ni
la conservation de l’énergie. Remarquons qu’idéalement, on souhaiterait également que l’énergie soit
exactement conservée, cependant Ge et Marsden (1988) ont montré qu’il n’existe pas en général de
tel schéma d’intégration pour un Hamiltonien non intégrable. Cependant, l’intégrateur
symplectique conserve exactement le Hamiltonien  d’un système perturbé voisin de celui décrit
par le Hamiltonien
d’un système perturbé voisin de celui décrit
par le Hamiltonien  initial :
initial :
 | (2.10) |
où  est fonction des dérivés d’ordre
est fonction des dérivés d’ordre  de
de  (Yoshida, 1990a, 1990b). Par définition, un
intégrateur symplectique est d’ordre
(Yoshida, 1990a, 1990b). Par définition, un
intégrateur symplectique est d’ordre  si :
si :
 | (2.11) |
2.1.3.4 Méthodes de construction
Brièvement, nous pouvons diviser les méthodes d’intégration en deux grands groupes (Yoshida,
1993) :
- les méthodes implicites reposant sur
– un schéma de Runge-Kutta implicite (Sanz-Serna, 1988) ;
– l’utilisation de fonctions génératrices (Channel et Scovel, 1990).
- les méthodes explicites
– Ruth, le premier, a introduit l’utilisation d’intégrateur symplectique (1983), a
initialement utilisé des transformations canoniques successives pour réaliser des
intégrateurs jusqu’à l’ordre 4 ;
– Neri (1988) a reformulé le problème en utilisant l’algèbre de Lie ;
– Yoshida (1990) a donné un schéma général pour construire un intégrateur d’ordre
 à partir d’un intégrateur d’ordre
à partir d’un intégrateur d’ordre  ;
;
– Abell (1995) a introduit l’utilisation d’applications de Crémona (applications
polynomiales symplectiques).
Nous nous sommes intéressés plus particulièrement à un schéma explicite que nous détaillerons
un peu plus loin. Tout d’abord, définissons un petit peu la philosophie de construction d’un
intégrateur. Elle repose sur cinq points essentiels :
- Le Hamiltonien est local ;
- Il est strictement impossible de connaître le Hamiltonien réel de l’élément ou de
l’accélérateur de par les erreurs de construction, les erreurs aléatoires (champs,
déplacements, marées, vibrations) ;
- Nous nous intéressons à la modélisation de la dynamique la plus proche de la dynamique
réelle de l’accélérateur (nonlinéarités, stabilité) ;
- Si la solution exacte d’un Hamiltonien est connue, alors elle est symplectique, sinon le
sus-dit Hamiltonien est découpé en parties séparément intégrables ;
- Si besoin, l’ordre de l’intégrateur peut être augmenté à volonté (aux dépens du temps
de calcul).
A la suite de Forest (1998, passim), nous considérons que l’application générée par un intégrateur doit
toujours être vue comme un nouveau modèle de l’aimant. C’est pourquoi les paramètres linéaires
doivent — si besoin — être réajustés afin d’obtenir avec l’intégrateur symplectique une machine
dont les nombres d’ondes et paramètres linéaires correspondent à un intégrateur « matrice de
transfert-kick ». Nous ne rentrerons pas dans les discussions des partisans de l’ancienne école, qui
prétendent que leur méthode d’intégration est plus exacte que celle fondée sur un schéma
symplectique. Dans la première, les éléments sont dits épais car représentés matriciellement (de
longueur non négligeable), dans la dernière, les éléments sont parfois interprétés comme « coupés
en rondelles » suivant un schéma « section droite-lentille mince–section droite » (cf. Peggs et
Talman (1986), Schachinger et Talman (1987)).
Nous allons maintenant présenter les deux principales approches rencontrées dans la plupart des
codes modernes dans le monde des accélérateurs.
Décomposition en produit d’applications symplectiques :
La première approche consiste à écrire le flot hamiltonien sous la forme d’un produit
d’applications symplectiques (Dragt et Finn, 1976, Dragt et al., 1988, Dragt, 1996), i.e. sous la
forme :
 | (2.12) |
où les fonctions  sont des polynômes homogènes de degré
sont des polynômes homogènes de degré  déterminées à partir du
Hamiltonien
déterminées à partir du
Hamiltonien  du système considéré. Le facteur
du système considéré. Le facteur  représente la partie linéaire de la
transformation usuellement écrite par une matrice de transfert
représente la partie linéaire de la
transformation usuellement écrite par une matrice de transfert  (cf. Eq. 2.1). L’application
(cf. Eq. 2.1). L’application
 décrit les termes nonlinéaires d’ordre deux (et parfois supérieurs) correspondant aux
coefficients
décrit les termes nonlinéaires d’ordre deux (et parfois supérieurs) correspondant aux
coefficients  ,
,  , etc. du développement de Taylor 2.1 (Dragt et Forest, 1986 – Dragt et
Abell, 1996 – Dragt, 1996). Le produit d’applications symplectiques 2.12 peut être tronqué sans
aucune difficulté à n’importe quel ordre
, etc. du développement de Taylor 2.1 (Dragt et Forest, 1986 – Dragt et
Abell, 1996 – Dragt, 1996). Le produit d’applications symplectiques 2.12 peut être tronqué sans
aucune difficulté à n’importe quel ordre  :
:
 | (2.13) |
Par construction la troncature est symplectique. Formellement, cette procédure est appliquée pour
chaque élément. Il est aussi possible de calculer l’application de transfert  pour l’anneau
complet, on obtient alors l’application de premier retour qu’il suffit d’itérer pour obtenir un logiciel
de tracking symplectique d’ordre
pour l’anneau
complet, on obtient alors l’application de premier retour qu’il suffit d’itérer pour obtenir un logiciel
de tracking symplectique d’ordre  .
.
Une difficulté pratique apparaît, car l’application de transfert  n’est pas intégrable pour
n’est pas intégrable pour
 supérieur à 2. Cette difficulté est levée par l’utilisation d’une fonction génératrice
supérieur à 2. Cette difficulté est levée par l’utilisation d’une fonction génératrice
 :
:
 | (2.14) |
où  est un polynôme à déterminer. On obtient alors la transformation canonique des
variables :
est un polynôme à déterminer. On obtient alors la transformation canonique des
variables :
 | (2.15) |
Le polynôme  est déterminé de manière à ce que les applications 2.13 et 2.15 soient égales
jusqu’à l’ordre
est déterminé de manière à ce que les applications 2.13 et 2.15 soient égales
jusqu’à l’ordre  : il s’exprime en fonction des générateurs
: il s’exprime en fonction des générateurs  (pour plus de détail le lecteur
pourra se rapporter par exemple au guide des méthodes physiques de logiciel MAD [58] ou au
manuel de MARYLIE [29]).
(pour plus de détail le lecteur
pourra se rapporter par exemple au guide des méthodes physiques de logiciel MAD [58] ou au
manuel de MARYLIE [29]).
On remarque que la première équation de l’expression 2.15 est implicite en  . Elle est résolue
numériquement en utilisant une méthode de Newton. La deuxième équation peut ensuite être
calculée.
. Elle est résolue
numériquement en utilisant une méthode de Newton. La deuxième équation peut ensuite être
calculée.
Cette approche est suivie, par exemple, par les logiciels MARYLIE [29] et MAD [58]. Une
approche voisine consiste à approximer  par des fonctions de Crémona (voir par exemple Dragt
et Abell, 1996).
par des fonctions de Crémona (voir par exemple Dragt
et Abell, 1996).
Intégration directe :
La seconde approche, que nous avons retenue, repose sur l’intégration directe du Hamiltonien
d’un élément de l’anneau. Ce choix se justifie par notre volonté de réaliser un code d’intégration
optimal en termes de vitesse et de précision. Cette méthode est simple à mettre en œuvre et
découple deux problèmes distincts, à savoir la simulation et l’analyse globale de l’anneau. Si le
Hamiltonien est intégrable et si la solution analytique se prête bien au calcul numérique, nous la
conserverons. Dans le cas contraire, nous décomposons le Hamiltonien en deux parties séparément
intégrables,  où
où  peut être vu comme un paramètre de perturbation ; puis nous
utilisons le théorème de Baker-Campbell-Hausdorff (BCH) qui stipule que l’on peut écrire
formellement :
peut être vu comme un paramètre de perturbation ; puis nous
utilisons le théorème de Baker-Campbell-Hausdorff (BCH) qui stipule que l’on peut écrire
formellement :
 | (2.16) |
avec le Hamiltonien formel :
 | (2.17) |
Ainsi l’intégrateur symplectique du premier ordre le plus simple est :
 | (2.18) |
Avec l’aide du théorème BCH, des intégrateurs ( ) d’ordre quelconque
) d’ordre quelconque  peuvent être
construits :
peuvent être
construits :
 | (2.19) |
où les coefficients  sont déterminées pour que le reste soit d’ordre
sont déterminées pour que le reste soit d’ordre  . En particulier, les
deux relations suivantes doivent être vérifiées :
. En particulier, les
deux relations suivantes doivent être vérifiées :
 | (2.20) |
Dans la suite, on se restreint à la classe des intégrateurs symétriques, i.e.  .
Par construction ces intégrateurs sont de reste paire
.
Par construction ces intégrateurs sont de reste paire  . Le célèbre intégrateur
d’ordre 2 appelé dans la littérature leapfrog integrator (« saute-mouton ») s’écrit (Ruth,
1983) :
. Le célèbre intégrateur
d’ordre 2 appelé dans la littérature leapfrog integrator (« saute-mouton ») s’écrit (Ruth,
1983) :
 | (2.21) |
avec  et
et  .
.
Une manière simple pour obtenir des intégrateurs d’ordre plus élevé repose sur le travail de
Yoshida (1990). L’idée principale est de composer le précédent intégrateur d’ordre 2 pour obtenir
un intégrateur symétrique d’ordre plus élevé. Donc, on pourra écrire un intégrateur d’ordre 4
comme :
 | (2.22) |
avec pour condition de faire un pas total de longueur  et d’annuler le terme d’ordre 2,
soit :
et d’annuler le terme d’ordre 2,
soit :
 | (2.23) |
De manière générale, Yoshida montre qu’un intégrateur d’ordre  peut être construit à
partir d’un intégrateur d’ordre
peut être construit à
partir d’un intégrateur d’ordre  en utilisant le schéma symplectique :
en utilisant le schéma symplectique :
 | (2.24) |
Immédiatement, on obtient :  et
et  .
.
Les deux intégrateurs les plus fréquemment utilisés en physique des accélérateurs
circulaires
sont :
– l’intégrateur d’ordre 4 ( ) — initialement établi par Ruth (1983, puis reformulé par Forest
et Ruth, 1990) — que l’on peut aussi écrire :
) — initialement établi par Ruth (1983, puis reformulé par Forest
et Ruth, 1990) — que l’on peut aussi écrire :
 | (2.25) |
avec  ,
,  ,
,  ,
,  et
et  .
.
– l’intégrateur d’ordre 6 ( ) (Yoshida, 1990) :
) (Yoshida, 1990) :
 | (2.26) |
avec trois jeux de solutions possibles (cf. Tab. 2.1) et avec toujours un grand pas négatif.
|
|
|
| | | Solution 1 | Solution 2 | Solution 3 |
|
|
|
| | a | -0.117767998417887E1 | -0.213228522200144E1 | +0.152886228424922E2 |
| b | +0.235573213359357E0 | +0.426068187079180E2 | -0.214403531630539E1 |
| c | +0.784513610477560E0 | +0.143984816797678E1 | +0.144778256239930E1 |
|
|
|
| | d | 1-2(a+b+c)
|
|
|
|
| | |
| TAB. 2.1: | Trois jeux de coefficients pour construire un intégrateur symplectique d’ordre 6 en
utilisant la méthode de Yoshida. Dans chacun des cas, il existe un grand pas négatif provenant
de la relation 2.20 :  . . |
|
2.1.4 Intégrateurs utilisés
La classe d’intégrateurs que nous avons utilisée est présentée dans l’article de Laskar et Robutel
(2000) auquel le lecteur pourra se référer pour plus de détails.
Si l’on distingue  et
et  dans l’expression générale du Hamiltonien, les intégrateurs
symétriques peuvent appartenir à l’une des deux classes
dans l’expression générale du Hamiltonien, les intégrateurs
symétriques peuvent appartenir à l’une des deux classes  et
et  définies
par :
définies
par :
 2n 2n | : ec1sLA
ed1sLεB
…ednsLεB
ecn+1sLA
ednsLεB
…ed1sLεB
ec1sLA
| |
|
 2n+1 2n+1 | : ec1sLA
ed1sLεB
…ecn+1sLA
edn+1sLεB
ecn+1sLA
…ed1sLεB
ec1sLA
| |
|
 2n 2n | : ed1sLεB
ec2sLA
ed2sLεB
…ednsLεB
ecn+1sLA
ednsLεB
…ed2sLεB
ec2sLA
ed1sLεB
| (2.27)
|
 2n+1 2n+1 | : ed1sLεB
ec2sLA
ed2sLεB
…ecn+1sLA
edn+1sLεB
ecn+1sLA
…ed2sLεB
ec2sLA
ed1sLεB
| | |
Par exemple l’intégrateur leapfrog (Eq. 2.21) appartient à la classe  . C’est un intégrateur
d’ordre 2 avec pour Hamiltonien formel
. C’est un intégrateur
d’ordre 2 avec pour Hamiltonien formel  . L’intégrateur d’ordre 4 de Forest et
Ruth (Eq. 2.25) appartient à la classe
. L’intégrateur d’ordre 4 de Forest et
Ruth (Eq. 2.25) appartient à la classe  avec
avec  . Nous pouvons
remarquer la présence de deux pas négatifs pour cet intégrateur, ce qui rend la valeur absolue de
chaque pas intermédiaire relativement grande pour un pas total de 1 :
. Nous pouvons
remarquer la présence de deux pas négatifs pour cet intégrateur, ce qui rend la valeur absolue de
chaque pas intermédiaire relativement grande pour un pas total de 1 :  ,
,
 ,
,  et
et  . Il s’ensuit que pour de grands pas d’intégration,
la méthode perd de son efficacité (coût élevé, instabilités numériques). Suzuki (1991) a
démontré qu’il est impossible de réaliser un intégrateur symplectique d’ordre
. Il s’ensuit que pour de grands pas d’intégration,
la méthode perd de son efficacité (coût élevé, instabilités numériques). Suzuki (1991) a
démontré qu’il est impossible de réaliser un intégrateur symplectique d’ordre  avec
des pas tous positifs. Cependant, le problème des pas négatifs peut être partiellement
solutionné.
avec
des pas tous positifs. Cependant, le problème des pas négatifs peut être partiellement
solutionné.
Jusqu’à présent, nous n’avons pas pris en compte l’existence du petit paramètre  . La méthode
retenue consiste à déterminer les coefficients
. La méthode
retenue consiste à déterminer les coefficients  des intégrateurs 2.27 pour avoir un reste
d’ordre
des intégrateurs 2.27 pour avoir un reste
d’ordre  et non plus d’ordre
et non plus d’ordre  .
.
Par exemple pour un intégrateur de classe  (ordre quatre), on a :
(ordre quatre), on a :
 | (2.28) |
l’unique solution pour les coefficients est :
avec
 | (2.29) |
De manière similaire pour un intégrateur de classe  ,
,
 | (2.30) |
les coefficients positifs solutions sont l’unique triplet :
Ce sont ces deux intégrateurs qui ont été retenus pour l’écriture du code de tracking.
En fait, dans le cas particulier où  est quadratique en les impulsions et
est quadratique en les impulsions et  ne dépend que des
positions, il est possible d’améliorer encore la méthode en introduisant un correcteur
ne dépend que des
positions, il est possible d’améliorer encore la méthode en introduisant un correcteur  défini par
(voir Laskar et Robutel, 2000) :
défini par
(voir Laskar et Robutel, 2000) :
 | (2.31) |
où le coefficient du correcteur  est déterminé pour annuler le terme d’ordre
est déterminé pour annuler le terme d’ordre  (voir par
exemple l’expression 2.29 pour l’intégrateur
(voir par
exemple l’expression 2.29 pour l’intégrateur  ). On notera que le correcteur introduit un
pas négatif, mais qu’il est d’autant plus petit que l’ordre de la méthode est élevé (Tab 2.2).
). On notera que le correcteur introduit un
pas négatif, mais qu’il est d’autant plus petit que l’ordre de la méthode est élevé (Tab 2.2).
Typiquement, le schéma symplectique avec correcteur s’écrit, par exemple pour un intégrateur
 :
:
 | (2.32) |
L’intégrateur avec correcteur est encore symétrique et son reste est d’ordre  .
.
Les intégrateurs que j’utiliserai sont d’ordre deux et quatre. Typiquement, un intégrateur
d’ordre 4 sera utilisé pour intégrer les éléments de type dipôles, quadripôles alors qu’un intégrateur
d’ordre  suffira pour l’intégration des multipôles individuels.
suffira pour l’intégration des multipôles individuels.
Nous montrerons qu’un intégrateur d’ordre deux avec correcteur est plus précis d’un
ordre de grandeur que l’intégrateur de Ruth (cf. infra). Je vais maintenant présenter le
Hamiltonien local pour chacun des principaux éléments magnétiques et les approximations
réalisées.
2.1.5 Intégration des éléments parfaits
Nous avons vu page , l’expression la plus générale du Hamiltonien pour un accélérateur (cf.
Eq. 1.35) exprimée en fonction des trois paires de variables canoniques  ,
,  et
et
 . Cette expression dépend explicitement de la longitude
. Cette expression dépend explicitement de la longitude  prise comme variable
indépendante.
prise comme variable
indépendante.
Dans toute la suite, sauf mention explicite, j’ai choisi de travailler sur la forme quadratique en les
impulsions en réalisant un développement limité au premier ordre de la racine carrée. Pour
mémoire, je rappelle son expression :
 | (2.33) |
La première approximation réalisée a consisté à développer la racine carrée de l’expression 1.35,
terme nonlinéaire qui caractérise le fait que les particules sont relativistes. Ce développement
permet d’obtenir une expression polynomiale dans les variables accélérateurs. Cette approximation
est à la base de nombreux code de tracking. Cependant, il est intéressant de noter que le premier
terme négligé est le terme octupolaire,
 | (2.34) |
c’est un terme purement cinématique
qui doit néanmoins être pris en compte comme correction quand l’émittance est grande et lorsque la
fonction de Twiss  est importante (voir Papaphilippou et Abell, 2000).
est importante (voir Papaphilippou et Abell, 2000).
Dans ce cas, il suffira soit d’introduire des termes d’ordre supérieur du développement limité
de la racine carrée, soit de garder la racine carrée. Ce qui a l’inconvénient majeur de
compliquer les calculs ; de plus, un intégrateur du type  avec correcteur
ne pourra plus être implémenté, car le correcteur
avec correcteur
ne pourra plus être implémenté, car le correcteur  n’est en général plus
intégrable.
n’est en général plus
intégrable.
La deuxième approximation fondamentale concerne l’expression générale du champ magnétique
(cf. Eq. 1.46 page ) : on suppose que le champ magnétique est constant à l’intérieur d’un
élément et nul à l’extérieur, si bien que le Hamiltonien devient autonome pour un élément
donné. En réalité, la transition est plus douce. En anglais, on parle d’approximation
hard edge, ce qui signifie que les éléments ont un profil magnétique rectangulaire. Cette
approximation ne sera plus suffisante pour les machines de faible rayon de courbure.
Pour prendre en compte les champs de fuite, une solution simple consiste à compléter la
description des éléments ; nous en discuterons plus en détail au moment d’aborder les éléments
dipolaires.
Les équations du mouvement sont données par les équations de Hamilton :
 | (2.35) |
Etrangement, bien que certains éléments (dipôle, quadripôles) soient complètement intégrables
à la suite des deux approximations précédentes, l’intégration est généralement réalisée en utilisant
une solution approchée au moyen d’un intégrateur symplectique. Une des raisons est que cette
démarche est nécessaire si l’on désire obtenir l’application de premier retour de l’anneau et utiliser
des méthodes automatiques d’algèbre différentielle (e.g. le DA-Package appelé plus tard Truncated
Power Series Algebra — TPSA — développé en FORTRAN77 par Berz en 1989, voir
aussi son livre : Modern Map Methods in Particle Beam Physics, 1999 et plus récemment
The Full Polymorphic Package qui est une extension écrite en FORTRAN90 par Forest
[47]).
Au cours de ce travail, je n’étais pas intéressé — dans un premier temps — par le calcul de
l’application de premier retour (analyse globale de l’anneau), c’est pourquoi je conserve la solution
exacte si elle existe — sauf temps prohibitifs de calculs, instabilités numériques, rendant
l’intégration symplectique plus efficace — De plus, je reste convaincu qu’il est très souvent plus
avantageux en termes de temps de calcul d’écrire un code de tracking construit sur le
Hamiltonien local de chacun des éléments (au moins pour les machines à rayonnement
synchrotron).
2.1.5.1 Section droite
Description et Hamiltonien :
La section droite, drift en anglais, est l’élément le plus simple à modéliser dans un accélérateur,
car c’est un élément sans champ magnétique ( ). Elle est caractérisée par un seul
paramètre : sa longueur notée
). Elle est caractérisée par un seul
paramètre : sa longueur notée  . En coordonnées rectangulaires (
. En coordonnées rectangulaires ( ), son Hamiltonien se
réduit à la forme (cf. Eq. 2.33) :
), son Hamiltonien se
réduit à la forme (cf. Eq. 2.33) :
 | (2.36) |
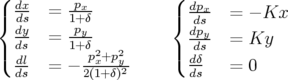
Les variables  sont cycliques,
les équations du mouvement sont :
sont cycliques,
les équations du mouvement sont :
 | (2.37) |
Une seule hypothèse de calcul : La linéarité des équations est obtenue par le développement
limité du terme cinématique (cf. supra) que j’appelle pour la suite approximation des petits
angles.
Intégration des équations :
Le système 2.37 est complètement intégrable de solution :
 | (2.38) |
où les exposants  et
et  désignent les coordonnées canoniques respectivement à l’entrée et à la
sortie de la section droite de longueur
désignent les coordonnées canoniques respectivement à l’entrée et à la
sortie de la section droite de longueur  .
.
Prise en compte des termes négligés :
Si la racine carrée est conservée, les équations du mouvement sont nonlinéaires. Il est
néanmoins encore aisé d’intégrer les équations du mouvement en coordonnées rectangulaires ou
curvilignes (cf. annexe A.1 et annexe A.3 expression A.36). Il est ainsi possible de vérifier la
validité des approximations réalisées.
2.1.5.2 Aimant de courbure parfait
Un dipôle simple est caractérisé par un rayon de courbure constant  et une longueur
et une longueur  ; en
moyenne, il courbe la trajectoire d’une particule d’un angle
; en
moyenne, il courbe la trajectoire d’une particule d’un angle  . Son Hamiltonien s’exprime
naturellement en coordonnées curvilignes en utilisant les équations 2.33 et 1.51 :
. Son Hamiltonien s’exprime
naturellement en coordonnées curvilignes en utilisant les équations 2.33 et 1.51 :
 | (2.39) |
Par la suite, je ne distinguerai plus le rayon de courbure  de l’élément et celui introduit par le
système de coordonnées curvilignes (
de l’élément et celui introduit par le
système de coordonnées curvilignes ( ). Le terme quadratique en
). Le terme quadratique en  de l’expression 2.39
traduit une focalisation horizontale purement géométrique du dipôle.
de l’expression 2.39
traduit une focalisation horizontale purement géométrique du dipôle.
Pour intégrer le Hamiltonien 2.39, je vais me placer dans un cadre un peu plus général. En effet,
dans certaines sources de lumière, comme à l’ALS, il existe des dipôles dits combinés, car ils
comprennent en plus du terme dipolaire, une composante quadripolaire.
A) Dipôle combiné
Description et Hamiltonien : Le Hamiltonien d’un dipôle combiné est déduit des
équations 2.33, 1.51 et 1.53 :
| ℋ(x,y,l,px,py,δ) | =  + hx + hx − hx(1 + δ) + h(x + h − hx(1 + δ) + h(x + h ) + ) +  (x2 − y2) (x2 − y2) | |
|
| =  + hx + hx − hδx + h2 − hδx + h2 + +  (x2 − y2) (x2 − y2) | (2.40) |
où le coefficient  caractérise le gradient quadripolaire. Dans la plupart des
codes de tracking (e.g. BETA [93], DESPOT [42], TRACY [11]), on fait de plus
l’approximation dite des grandes machines en négligeant le terme encadré dans l’équation
ci-dessus,
de type hexapolaire, qui contribue fortement à la chromaticité des petites machines (Dragt, 1982 et
Forest, 1998). Si bien qu’au final, le Hamiltonien du dipôle combiné est simplement :
caractérise le gradient quadripolaire. Dans la plupart des
codes de tracking (e.g. BETA [93], DESPOT [42], TRACY [11]), on fait de plus
l’approximation dite des grandes machines en négligeant le terme encadré dans l’équation
ci-dessus,
de type hexapolaire, qui contribue fortement à la chromaticité des petites machines (Dragt, 1982 et
Forest, 1998). Si bien qu’au final, le Hamiltonien du dipôle combiné est simplement :
 | (2.41) |
On en déduit les équations du mouvement :
 | (2.42) |
Hypothèses de calcul : les approximations (a) des grandes machines, (b) des petits angles et
(c) hard edge pour le champ magnétique ont été supposées pour exprimer le Hamiltonien du dipôle
combiné sous la forme 2.41.
Intégration exacte des équations : Les équations du mouvement 2.42 sont complètement
intégrables (cf. équations de deux oscillateurs harmoniques découplés). La solution exacte
est donnée en annexe A.2 (p. ) en termes de fonctions trigonométriques circulaires et
hyperboliques.
Intégration approchée des équations : Il est également possible d’utiliser un schéma
symplectique pour intégrer le Hamiltonien 2.41 que l’on décompose en deux parties séparément
intégrables :
 | (2.43) |
Comme annoncé dans la section précédente, ce découpage du Hamiltonien va nous
permettre d’utiliser un intégrateur de classe  ou de classe
ou de classe  . Quelque
soit le type d’intégrateur choisi, il suffit de savoir évaluer les deux opérateurs
. Quelque
soit le type d’intégrateur choisi, il suffit de savoir évaluer les deux opérateurs  et
et
 . En fait le calcul est presque immédiat, dans chacun des cas, il y a au plus un seul
crochet de Poisson à calculer. On obtient les applications respectivement pour
. En fait le calcul est presque immédiat, dans chacun des cas, il y a au plus un seul
crochet de Poisson à calculer. On obtient les applications respectivement pour  et
et
 :
:
 | (2.44) |
 | (2.45) |
Nous avons également vu qu’il est possible d’améliorer l’intégrateur en introduisant un
correcteur (cf. Eq. 2.31). Il suffit de savoir calculer et évaluer le double crochet de Poisson
 :
:
 | (2.46) |
avec  et
et  . L’application définie pour le correcteur est alors :
. L’application définie pour le correcteur est alors :
 | (2.47) |
avec  conformément à l’équation 2.31.
conformément à l’équation 2.31.
Correction due aux coins de l’aimant :
Pour être rigoureux, l’expression du Hamiltonien du dipôle combiné 2.41 décrit un aimant secteur
ou aimant à faces tournées (cf. la définition du bloc courbe page et le schéma 2.2-a). Souvent, les
aimants d’un accélérateur sont à faces parallèles (e.g. à l’ALS ou Super-ACO), il est donc nécessaire de
corriger les effets de bord introduits par les coins des aimants (cf. Fig. 2.2-b). Au premier ordre, ces
effets se modélisent par un champ quadripolaire focalisant horizontalement et défocalisant
verticalement.
L’application entre l’entrée et la sortie d’un aimant à faces parallèles est simplement — au premier
ordre — la composition des applications d’un aimant secteur,  , et des coins d’entrée,
, et des coins d’entrée,  ,
et sortie,
,
et sortie,  ,
,  (Forest et al., 1994), soit pour un angle d’entrée ou de sortie
de l’aimant
(Forest et al., 1994), soit pour un angle d’entrée ou de sortie
de l’aimant  :
:
 | (2.48) |
Notons que cet effet sera prépondérant pour les petites machines, car il est proportionnel à la
courbure  .
.
Champs de fuite :
Pour les machines à faible rayon de courbure comme Super-ACO, un effet supplémentaire est
encore à ajouter dans le modèle : les champs de fuite. Ce phénomène est simplement lié au fait que
le champ magnétique décroît sur les bords de l’aimant et n’est pas tout à fait nul juste à l’extérieur du
dipôle (l’approximation hard-edge doit être complétée). Au premier ordre, les champs de fuite induisent
une composante quadripolaire verticale proportionnelle à la courbure  de l’anneau. Le déphasage
vertical
(
de l’anneau. Le déphasage
vertical
( ) est donné par la formule (Brown, 1982, pp. 116–117) :
) est donné par la formule (Brown, 1982, pp. 116–117) :
 | (2.49) |
avec  la distance entre les deux pôles de l’aimant,
la distance entre les deux pôles de l’aimant,  la courbure,
la courbure,  l’angle d’entrée (e) ou de
sortie (s) et
l’angle d’entrée (e) ou de
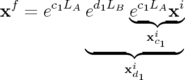
sortie (s) et  , l’intégrale :
, l’intégrale :
![∫ +∞ By (s)[B0 − By(s)]
𝒦 = ----------2-------ds
−∞ gB 0](these650x.png) | (2.50) |
où  est l’amplitude du champs de fuite sur le plan moyen à la longitude
est l’amplitude du champs de fuite sur le plan moyen à la longitude  mesurée
depuis l’entrée de l’aimant et
mesurée
depuis l’entrée de l’aimant et  est la valeur asymptotique de
est la valeur asymptotique de  dans l’aimant (cf.
Fig.2.3).
dans l’aimant (cf.
Fig.2.3).
L’application symplectique  du premier ordre incluant les coins et le champ de fuite de
l’aimant :
du premier ordre incluant les coins et le champ de fuite de
l’aimant :
 | (2.51) |
B) Dipôle simple
Pour un dipôle simple, il suffit de poser  dans les formules établies pour le dipôle
combiné.
En annexe A.2, les équations du mouvement sont intégrées pour différentes approximations et
méthodes d’intégration : (a) sans approximations des grandes machines et des petits angles en
géométrie curviligne et rectangulaire et (b) en prenant en compte le terme des petits
machines.
dans les formules établies pour le dipôle
combiné.
En annexe A.2, les équations du mouvement sont intégrées pour différentes approximations et
méthodes d’intégration : (a) sans approximations des grandes machines et des petits angles en
géométrie curviligne et rectangulaire et (b) en prenant en compte le terme des petits
machines.
2.1.5.3 Quadripôle droit
Description et Hamiltonien : Un quadripôle droit est un élément magnétique dont la vocation
est de focaliser la particule qui le traverse ; il a une longueur  et un gradient magnétique
et un gradient magnétique
 ; son Hamiltonien s’exprime naturellement en géométrie cartésienne à partir des
expressions 2.33 et 1.53 :
; son Hamiltonien s’exprime naturellement en géométrie cartésienne à partir des
expressions 2.33 et 1.53 :
 | (2.52) |
Les équations du mouvement du quadripôle sont ( est cyclique) :
est cyclique) :
 | (2.53) |
Hypothèses de calcul : L’expression du Hamiltonien 2.52 est établie dans (a) l’approximation des
petits angles et (b) l’approximation hard-edge.
Intégration « exacte » : Les équations du mouvement 2.53 s’intègrent directement pour une
longueur  et pour
et pour  , on obtient :
, on obtient :
 | (2.54) |
avec  ,
,  et
et
| Δl = |  ω ω (xi)2 − (xi)2 − ω ω (yi)2 (yi)2 | |
|
| −   (pxi)2 − (pxi)2 −   (pyi)2 (pyi)2 | (2.55)
|
|   xip
xi − xip
xi −  yip
yi yip
yi | | |
Cette application de transfert décrit un quadripôle focalisant dans le plan horizontal et défocalisant
dans le plan vertical. Dans le cas  , il suffit de poser
, il suffit de poser  et d’inverser les fonctions
circulaires et hyperboliques dans les équations 2.54. Le quadripôle est alors focalisant dans le plan
vertical.
et d’inverser les fonctions
circulaires et hyperboliques dans les équations 2.54. Le quadripôle est alors focalisant dans le plan
vertical.
Intégrateur symplectique : Les solutions s’écrivent comme celles du dipôle combiné (cf. Eq. 2.44
à 2.47) en posant une courbure nulle, i.e.  .
.
2.1.5.4 Hexapôle parfait droit
Description et Hamiltonien : Les hexapôles sont inévitablement introduits pour corriger la
chromaticité. Le Hamiltonien d’un hexapôle de force  et de longueur
et de longueur  s’exprime en
utilisant les équations 2.33 et 1.53 en coordonnées rectangulaires par :
s’exprime en
utilisant les équations 2.33 et 1.53 en coordonnées rectangulaires par :
 | (2.56) |
Les équations du mouvement sont ( est cyclique) :
est cyclique) :
 | (2.57) |
Hypothèses de calcul : L’expression du Hamiltonien 2.56 est établie dans (a) l’approximation des
grandes machines, (b) l’approximation hard-edge.
Le schéma d’intégration que nous allons présenter pour l’hexapôle peut simplement se
généraliser pour modéliser un multipôle droit ou tourné quelconque. Par exemple, un  -pôles
droit de force
-pôles
droit de force  est modélisable par un Hamiltonien de la forme :
est modélisable par un Hamiltonien de la forme :
 | (2.58) |
Intégration approchée des équations : La partie  contient le Hamiltonien d’une
section droite dont la solution a déjà été calculée (cf. Eq. 2.38). Il ne reste plus qu’à intégrer la
partie
contient le Hamiltonien d’une
section droite dont la solution a déjà été calculée (cf. Eq. 2.38). Il ne reste plus qu’à intégrer la
partie  contenant le potentiel hexapolaire, on obtient l’application :
contenant le potentiel hexapolaire, on obtient l’application :
 | (2.59) |
avec  . Usuellement, l’hexapôle est modélisé par une lentille mince de longueur infinitésimale,
e.g.
. Usuellement, l’hexapôle est modélisé par une lentille mince de longueur infinitésimale,
e.g.  m. Dans ce cas, il suffira de prendre un intégrateur symplectique d’ordre 2. Si
l’hexapôle est modélisé par une lentille épaisse, un intégrateur d’ordre 4 est utilisé comme pour les
éléments magnétiques précédents.
m. Dans ce cas, il suffira de prendre un intégrateur symplectique d’ordre 2. Si
l’hexapôle est modélisé par une lentille épaisse, un intégrateur d’ordre 4 est utilisé comme pour les
éléments magnétiques précédents.
2.1.6 Etude comparative
2.1.6.1 Introduction
Un code d’intégration numérique a été écrit en langage FORTRAN90. Ce code prend en
compte l’ensemble des modèles d’éléments magnétiques précédemment présentés. Ce
programme est écrit de manière modulaire afin de pouvoir traiter les petites et grandes
machines ; il est possible d’introduire de nouveaux éléments magnétiques (e.g. les dispositifs
d’insertion) ; le code est dédié et optimisé pour le tracking. Les intégrateurs avec ou sans
correcteur de type  et
et  ont été programmés pour
ont été programmés pour  et
et  . Des
intégrateurs d’ordre plus élévé pourront sans difficulté être introduits par la suite. Pour
les comparaisons internes, l’intégrateur d’ordre 4 de Forest et Ruth a également été
programmé.
. Des
intégrateurs d’ordre plus élévé pourront sans difficulté être introduits par la suite. Pour
les comparaisons internes, l’intégrateur d’ordre 4 de Forest et Ruth a également été
programmé.
Différents types de comparaisons ont été effectués, en particulier avec les codes DESPOT et
MAD respectivement sur une maille de l’ALS (grande machine) et de Super-ACO (petite machine).
Les calculs ont été réalisés en double précision sur une station DIGITAL PWS 433 AU (EV56 à 433
MHz).
2.1.6.2 Propriétés
Précision :
Nous avons vérifié la précision de l’intégration pour chaque élément magnétique modélisé. Le
Hamiltonien est une intégrale première du mouvement. Nous présentons quelques résultats
pour le dipôle combiné dans l’approximation des grandes machines. Son Hamiltonien est
rappelé :
avec comme courbure  , gradient quadripolaire
, gradient quadripolaire  et longueur
et longueur
 . Le dipôle est ainsi focalisant dans les deux plans.
. Le dipôle est ainsi focalisant dans les deux plans.
Tout d’abord, il est nécessaire de remarquer que le Hamiltonien s’apparente à celui de deux
oscillateurs. Les parties  et
et  sont comparables i.e. le petit paramètre
sont comparables i.e. le petit paramètre  est voisin de
l’unité. Donc pour cet élément, il sera inutile de vouloir utiliser un intégrateur d’ordre
supérieur à 4 puisque la nouvelle classe d’intégrateurs n’a d’intérêt qui si
est voisin de
l’unité. Donc pour cet élément, il sera inutile de vouloir utiliser un intégrateur d’ordre
supérieur à 4 puisque la nouvelle classe d’intégrateurs n’a d’intérêt qui si  est un petit
paramètre.
est un petit
paramètre.
Les erreurs sur l’énergie du dipôle combiné sont calculées sur un temps d’intégration de 1 000
passages à travers l’aimant (Fig. 2.4). Pour l’intégration exacte (cf. annexe A.2.4, page ), l’erreur
est aléatoire avec une dérive numérique linéaire du nombre d’itérations comme attendu (la
précision machine est  ).
).
Les trois schémas symplectiques choisis sont le schéma de Ruth et le schéma  et
et
 avec correcteur. Le dipôle de longueur
avec correcteur. Le dipôle de longueur  est intégré en trois étapes d’intégration
(
est intégré en trois étapes d’intégration
( ). La meilleure des méthodes est l’intégrateur
). La meilleure des méthodes est l’intégrateur  qui est plus d’un ordre de grandeur
plus précis que le schéma de Ruth (Fig. 2.4).
qui est plus d’un ordre de grandeur
plus précis que le schéma de Ruth (Fig. 2.4).
Une étude systématique de la précision des méthodes a également été réalisée. Les intégrateurs
 et
et  avec correcteur sont comparés à coût constant (i.e. à nombre égal
d’évaluations) avec le schéma de Ruth. L’erreur relative des intégrateurs symplectiques est
présentée pour
avec correcteur sont comparés à coût constant (i.e. à nombre égal
d’évaluations) avec le schéma de Ruth. L’erreur relative des intégrateurs symplectiques est
présentée pour  en fonction du nombre d’étapes d’intégration pour un aimant de longueur
en fonction du nombre d’étapes d’intégration pour un aimant de longueur
 (Fig. 2.5). En échelle logarithmique, la pente des droites est 4, ce qui correspond à l’ordre des
méthodes utilisées. La méthode
(Fig. 2.5). En échelle logarithmique, la pente des droites est 4, ce qui correspond à l’ordre des
méthodes utilisées. La méthode  avec correcteur est plus précise que le schéma de Ruth
d’un ordre de grandeur.
avec correcteur est plus précise que le schéma de Ruth
d’un ordre de grandeur.
Ce résultat va pouvoir être utilisé pour diminuer, à précision constante, le temps d’intégration
des élément magnétique, soit de réduire le temps de tracking. Généralement, une à
deux étapes d’intégration sont gagnées par comparaison avec l’intégrateur de Forest et
Ruth.
Déphasage :
Un autre point remarquable de cette nouvelle classe d’intégrateurs est sa faible dérive en phase à
nombre égal d’itérations. En comparant la solution numérique obtenue par le schéma symplectique
par rapport à la solution exacte, on note que le déphasage introduit par la méthode  est
très faible par rapport à l’intégrateur de Ruth et Forest (voir Fig. 2.6 pour le dipôle
combiné et Fig. 2.7 pour une maille complète de l’ALS). Par exemple, le tableau 2.3
donne le nombre
est
très faible par rapport à l’intégrateur de Ruth et Forest (voir Fig. 2.6 pour le dipôle
combiné et Fig. 2.7 pour une maille complète de l’ALS). Par exemple, le tableau 2.3
donne le nombre  de tours de l’ALS pour obtenir un déphasage
de tours de l’ALS pour obtenir un déphasage  de
de  pour
différentes valeurs du nombre d’étapes
pour
différentes valeurs du nombre d’étapes  d’intégration des dipôles et des quadripôles de
l’anneau.
Une loi d’échelle entre le temps d’intégration
d’intégration des dipôles et des quadripôles de
l’anneau.
Une loi d’échelle entre le temps d’intégration  et le nombre d’étapes
et le nombre d’étapes  d’intégration
peut être établie. Si
d’intégration
peut être établie. Si  est la longueur de l’élément intégré
est la longueur de l’élément intégré  fois, et si
fois, et si  est le nombre
d’étapes pour intégrer l’aimant. Alors le pas de l’intégrateur pour chaque étape est
est le nombre
d’étapes pour intégrer l’aimant. Alors le pas de l’intégrateur pour chaque étape est  et on
établit :
et on
établit :
 |
où  ,
,  correspondent au nombre de fois qu’il faut intégrer l’aimant de longueur
correspondent au nombre de fois qu’il faut intégrer l’aimant de longueur  ,
respectivement en
,
respectivement en  et
et  étapes, pour obtenir un déphasage
étapes, pour obtenir un déphasage  entre le schéma symplectique (
entre le schéma symplectique ( ) et exact (
) et exact ( ). En effet, en se souvenant que
la méthode est d’ordre 4 et en ne gardant que les termes de plus bas degré, on peut
écrire :
). En effet, en se souvenant que
la méthode est d’ordre 4 et en ne gardant que les termes de plus bas degré, on peut
écrire :
Notons que le déphasage n’est pas une grandeur fondamentale pour déterminer si un intégrateur
numérique est meilleur qu’un autre. Nous avons vu précédemment qu’un intégrateur symplectique
peut être vu comme un modèle d’un élément magnétique. Ainsi pour retrouver les bons nombres
d’ondes, il suffirait d’ajuster les conditions initiales.
Jusqu’à présent, l’analyse de la précision des méthodes symplectiques n’a pas été
réalisée. Cependant, une remarque concernant la taille des pas d’intégration peut
être faite. Pour cela, décrivons succinctement le schéma d’intégration numérique
d’un élément de longueur  avec l’intégrateur
avec l’intégrateur  dont l’expression est
rappelée :
dont l’expression est
rappelée :
 | (2.60) |
avec  et
et  . Dans ce cas l’intégration est réalisée en deux pas suivant
. Dans ce cas l’intégration est réalisée en deux pas suivant  et un pas
suivant
et un pas
suivant  . Si l’intégration est réalisée en
. Si l’intégration est réalisée en  étapes, le schéma d’intégration 2.60 est composé
étapes, le schéma d’intégration 2.60 est composé  fois avec un pas
fois avec un pas  .
.
Ce processus est illustré pour les intégrateurs  et de Forest et Ruth (schéma 2.8 pour
et de Forest et Ruth (schéma 2.8 pour
 ). Pour l’intégrateur
). Pour l’intégrateur  les pas, tous positifs, sont petits, plus fins sur les bords de
l’élément et plus grands en son centre (cf. condition 2.20). L’intégrateur de Forest et Ruth est
caractérisé par la présence de grandes valeurs de pas. Pour intégrer
les pas, tous positifs, sont petits, plus fins sur les bords de
l’élément et plus grands en son centre (cf. condition 2.20). L’intégrateur de Forest et Ruth est
caractérisé par la présence de grandes valeurs de pas. Pour intégrer  , on fait deux pas positifs
, on fait deux pas positifs
 et deux pas négatifs
et deux pas négatifs  ; pour intégrer
; pour intégrer  , deux pas
positifs
, deux pas
positifs  et un grand pas négatif
et un grand pas négatif  .
.
La valeur des pas d’intégration a probablement une incidence sur la taille du reste des méthodes
symplectiques et donc sur leur précision et phase. Des études plus complètes pourront être
entreprises pour préciser ces phénomènes.
Conclusion :
Dans les approximations réalisées, il est nécessaire de trouver un compromis entre la précision et
le temps de calcul. L’utilisateur peut selon les besoins modifier la précision de calcul en jouant sur le
nombre d’étapes d’intégration d’un élément de longueur  . La nouvelle classe d’intégrateurs
utilisée permet de d’obtenir un intégrateur plus efficace que le schéma classique de Forest et Ruth à
précision de calcul égale.
. La nouvelle classe d’intégrateurs
utilisée permet de d’obtenir un intégrateur plus efficace que le schéma classique de Forest et Ruth à
précision de calcul égale.
2.2 Analyse en Fréquence
2.2.1 Introduction
Longtemps, le mouvement du Système Solaire a semblé être d’une régularité parfaite. Pour
étudier sa dynamique globale, Jacques Laskar a développé l’Analyse en Fréquence qui lui a
permis de mettre en évidence du chaos dans le Système Solaire (Laskar, 1988, 1990).
Cette méthode numérique utilise une méthode de Fourier raffinée ; elle est adaptée pour
l’analyse de la stabilité des orbites d’un système conservatif. Cette méthode a ensuite été
appliquée à l’étude da la stabilité de l’obliquité des planètes puis de la Terre (Laskar et
Robutel, 1993a et 1993b). Rapidement, elle a été utilisée pour caractériser la dynamique
d’autres systèmes : application standard (Laskar, Froeschlé et Celleti, 1992 – Carletti et
Laskar, 2000), dynamique galactique (Papaphilippou et Laskar, 1996 et 1998), dynamique
des accélérateurs (Dumas et Laskar, 1993 – Laskar et Robin, 1996 – Papaphilippou,
1999).
L’Analyse en Fréquence permet de caractériser finement la dynamique d’un système à  degrés
de liberté, est particulièrement adaptée aux systèmes à 3 degrés de liberté. Pour des orbites
régulières, la méthode donne une représentation analytique des solutions alors que pour des orbites
non régulières, elle fournit des critères permettant de caractériser le degré de nonlinéarité du
système.
degrés
de liberté, est particulièrement adaptée aux systèmes à 3 degrés de liberté. Pour des orbites
régulières, la méthode donne une représentation analytique des solutions alors que pour des orbites
non régulières, elle fournit des critères permettant de caractériser le degré de nonlinéarité du
système.
2.2.2 Application fréquence
Pour l’écriture de cette partie, je me suis inspiré des articles de J. Laskar décrivant de manière
exhaustive la méthode d’Analyse en Fréquence (1992, 1993, 1994 et 1999).
Pour décrire la méthode d’Analyse en Fréquence, nous allons d’abord nous placer dans le
cas général d’un système Hamiltonien autonome à  degrés de liberté écrit sous la
forme :
degrés de liberté écrit sous la
forme :
 | (2.61) |
où  représente la partie intégrable du mouvement et
représente la partie intégrable du mouvement et  un terme de perturbation — dans le
cadre de la dynamique d’un accélérateur, nous avons vu au cours du chapitre 1 (page ) que
un terme de perturbation — dans le
cadre de la dynamique d’un accélérateur, nous avons vu au cours du chapitre 1 (page ) que
 décrit le mouvement bétatron et
décrit le mouvement bétatron et  décrit par exemple les défauts multipolaires
—
décrit par exemple les défauts multipolaires
—
Supposons qu’en l’absence de perturbation ( ), le système puisse s’écrire en variables
actions-angles
), le système puisse s’écrire en variables
actions-angles  . Alors les équations du mouvement se réduisent à :
. Alors les équations du mouvement se réduisent à :
 | (2.62) |
Les solutions 2.62 peuvent s’écrire sous forme complexe  , soit :
, soit :
 | (2.63) |
Les orbites 2.63 sont confinées sur des tores de dimensions  , produits de cercles de rayons
, produits de cercles de rayons
 parcourus aux fréquences
parcourus aux fréquences  (cf. Fig. 2.9 pour
(cf. Fig. 2.9 pour  ).
).
S’il existe une bijection entre les actions et les fréquences, i.e. si la condition de
non-dégénérescence suivante est vérifiée :
 | (2.64) |
alors le mouvement peut être décrit de manière équivalente par les actions  ou les fréquences
ou les fréquences
 ; on définit alors l’application,
; on définit alors l’application,  , dite application fréquence :
, dite application fréquence :
 | (2.65) |
Si de plus, on se place sur une surface d’énergie constante ( ), alors seulement
), alors seulement
 actions sont indépendantes et l’application fréquence 2.65 devient (si par exemple,
actions sont indépendantes et l’application fréquence 2.65 devient (si par exemple,
 ) :
) :
 | (2.66) |
Le problème qui nous préoccupe est de savoir ce qu’il advient de ces orbites sous l’effet d’une
perturbation faible. La réponse est fournie par le théorème KAM (Kolmogorov-Arnold-Moser, voir
par exemple les références incluses in Laskar, 1999) : sous des conditions très générales, pour une
perturbation suffisamment faible, la plupart des tores du système non perturbé ( ) subsistent
mais sont déformés. Ce sont les tores dont les vecteurs fréquences vérifient la condition dite
diophantienne :
) subsistent
mais sont déformés. Ce sont les tores dont les vecteurs fréquences vérifient la condition dite
diophantienne :
 | (2.67) |
où  est une constante dépendant de
est une constante dépendant de  et de
et de  : ils sont appelés tores KAM. Les tores de
: ils sont appelés tores KAM. Les tores de  pour lesquels
pour lesquels  sont appelés tores résonants et sont détruits d’après le théorème
KAM. Entre les tores KAM, les orbites sont en général chaotiques. Cependant, il est encore possible
de construire une application fréquence (voir Laskar, 1999). Les solutions KAM peuvent alors
s’exprimer sous la forme :
sont appelés tores résonants et sont détruits d’après le théorème
KAM. Entre les tores KAM, les orbites sont en général chaotiques. Cependant, il est encore possible
de construire une application fréquence (voir Laskar, 1999). Les solutions KAM peuvent alors
s’exprimer sous la forme :
 | (2.68) |
Les coefficients  sont combinaison linéaire de
sont combinaison linéaire de  fréquences indépendantes appelées fréquences
fondamentales du système, i.e.
fréquences indépendantes appelées fréquences
fondamentales du système, i.e.  .
.
La méthode d’Analyse en Fréquence repose sur la construction de l’application fréquence
numérique,  , en recherchant une décomposition quasi-périodique d’une trajectoire sur un temps
d’intégration fini
, en recherchant une décomposition quasi-périodique d’une trajectoire sur un temps
d’intégration fini  et en utilisant une technique de Fourier raffinée (Laskar 1988, 1993 et 1999),
i.e. sous la forme d’un nombre fini
et en utilisant une technique de Fourier raffinée (Laskar 1988, 1993 et 1999),
i.e. sous la forme d’un nombre fini  de termes :
de termes :
 | (2.69) |
où les coefficients  sont ordonnés par amplitude
décroissante
et
sont ordonnés par amplitude
décroissante
et  est le vecteur de fréquences fondamentales.
est le vecteur de fréquences fondamentales.
A énergie fixée, une trajectoire de l’espace des phases vit sur une surface d’énergie de
dimension  . Habituellement, on observe le mouvement dans une surface de Poincaré,
i.e. que l’on enregistre une trajectoire discrète en fixant un des angles
. Habituellement, on observe le mouvement dans une surface de Poincaré,
i.e. que l’on enregistre une trajectoire discrète en fixant un des angles  , par exemple
, par exemple
 modulo
modulo  (cf. Fig. 2.10). Les fréquences fondamentales déduites du signal
quasi-périodique 2.69 sont exprimées par rapport à la section de Poincaré, donc par exemple dans
notre cas
(cf. Fig. 2.10). Les fréquences fondamentales déduites du signal
quasi-périodique 2.69 sont exprimées par rapport à la section de Poincaré, donc par exemple dans
notre cas  . Le mouvement est donc restreint sur un espace de dimension
. Le mouvement est donc restreint sur un espace de dimension  .
.
Pour l’Analyse en Fréquence, une condition plus stricte est adoptée : on fixe les  angles
angles
 . Dans ce cas, le mouvement est étudié dans un espace de dimension
. Dans ce cas, le mouvement est étudié dans un espace de dimension  . Il est
caractérisé par la donnée de
. Il est
caractérisé par la donnée de  actions.
actions.
En ne conservant que les fréquences fondamentales de la décomposition quasi-périodique
(Eq. 2.69) obtenue après intégration sur un intervalle de temps ![[τ,τ + T ]](these846x.png) , on construit
l’application fréquence numérique :
, on construit
l’application fréquence numérique :
| Fθ0T : ℝ × ℝn−1 | −→ℝn−1 | |
|
| (τ,I1,…,In−1) |  (ν1,…,νn−1) (ν1,…,νn−1) | (2.70) |
2.2.3 Propriétés de l’application fréquence numérique
L’étude des propriétés de l’application  va nous donner des informations sur le système
dynamique (résonances, nonlinéarités, chaos).
va nous donner des informations sur le système
dynamique (résonances, nonlinéarités, chaos).
- L’image
 est indépendante du choix dans angles initiaux
est indépendante du choix dans angles initiaux  (cf. sur un tore,
les fréquences ne dépendent pas de la phase) et
(cf. sur un tore,
les fréquences ne dépendent pas de la phase) et  est une fonction régulière pour
une trajectoire KAM. Inversement, la non-régularité de
est une fonction régulière pour
une trajectoire KAM. Inversement, la non-régularité de  nous permettra de
mettre en évidence les phénomènes résonants et les zones chaotiques.
nous permettra de
mettre en évidence les phénomènes résonants et les zones chaotiques.
- La convergence de la méthode est rapide et suit une loi en
 en utilisant une fenêtre
de Hanning alors qu’une transformée de Fourier rapide (FFT) converge en
en utilisant une fenêtre
de Hanning alors qu’une transformée de Fourier rapide (FFT) converge en  (Laskar,
1999). En effet, l’algorithme de la FFT présuppose que le signal recherché est périodique,
alors que l’Analyse en Fréquence cherche à reconstruire une plus grande classe de
signaux, à savoir les signaux quasi-périodiques de la forme (2.69) ; ce point fondamental
rend la méthode plus apte à l’étude d’un système dynamique. Cette propriété permet
de la calculer sur un temps d’intégration
(Laskar,
1999). En effet, l’algorithme de la FFT présuppose que le signal recherché est périodique,
alors que l’Analyse en Fréquence cherche à reconstruire une plus grande classe de
signaux, à savoir les signaux quasi-périodiques de la forme (2.69) ; ce point fondamental
rend la méthode plus apte à l’étude d’un système dynamique. Cette propriété permet
de la calculer sur un temps d’intégration  court et de faire de la prédiction à long
terme.
court et de faire de la prédiction à long
terme.
- L’application
 est invariante par translation dans le temps
est invariante par translation dans le temps  pour une trajectoire
régulière (trajectoire KAM). A l’inverse, la variation avec le temps des fréquences,
appelée diffusion, pourra être utilisée comme indice de stabilité et de chaoticité de la
trajectoire.
pour une trajectoire
régulière (trajectoire KAM). A l’inverse, la variation avec le temps des fréquences,
appelée diffusion, pourra être utilisée comme indice de stabilité et de chaoticité de la
trajectoire.
La diffusion des orbites nous donnera de précieuses informations sur la stabilité globale
de la dynamique du système étudié. Pour un système à deux degrés de liberté,
l’espace des phases est de dimension 4, les surfaces d’énergie de dimension 3 et l’espace
des fréquences de dimension 1 (cf. réduction par la conservation de l’énergie). Une
orbite KAM est représentée par un point dans l’espace des fréquences et vit sur un
tore de dimension 2. Une orbite non régulière n’est pas un point mais une courbe
révélant la diffusion entre les orbites régulières (cf. Fig. 2.11-a). Il est clair que dans
l’espace des fréquences, un point (dimension 0) sur une courbe de dimension 1 empêche
tout mouvement régulier d’avoir de grandes excursions en amplitude. De manière
équivalente, en se plaçant dans l’espace des phases, un tore de dimension 2 sépare une
surface d’énergie (dimension 3) en une partie intérieure et une partie extérieure : c’est
donc une barrière topologique à la diffusion.
Pour un système à trois degrés de liberté, la situation n’est plus du tout la même.
Un point n’arrête pas la diffusion dans un plan (cf. Fig. 2.11-b). Vus dans l’espace
des phases, les tores de dimension 3 ne sont plus des frontières topologiques à la
diffusion pour une surface d’énergie de dimension 5. Cependant il peut être montré
que la diffusion est quasi-nulle au voisinage des orbites régulières. Au voisinage d’une
trajectoire KAM, la diffusion décroît exponentiellement si bien qu’un grand nombre
de trajectoires régulières joue le rôle de barrière effective à la diffusion (résultat de
Morbidelli et Gorgilli, 1995).
2.2.4 Applications préliminaires
Avant d’appliquer l’Analyse en Fréquence à l’étude de la dynamique des accélérateurs, deux
applications simples vont être présentées succinctement. Le pendule mécanique qui modélise la
dynamique au voisinage d’une résonance. Puis, l’application d’Hénon qui est une application
nonlinéaire et me permettra d’introduire quelques notions supplémentaires sur l’étude de la
dynamique des systèmes.
2.2.4.1 Le pendule
Le Hamiltonien d’un pendule rigide peut s’écrire sous la forme :
 | (2.71) |
où  est l’angle de rotation du pendule et
est l’angle de rotation du pendule et  sa dérivée temporelle. Le pendule est un système
dynamique à un degré de liberté complètement intégrable qui permet de modéliser la dynamique
au voisinage d’une résonance (voir par exemple, Chirikov, 1979). Son portrait de phase
sa dérivée temporelle. Le pendule est un système
dynamique à un degré de liberté complètement intégrable qui permet de modéliser la dynamique
au voisinage d’une résonance (voir par exemple, Chirikov, 1979). Son portrait de phase  est
tracé pour différentes valeurs de l’énergie (Fig. 2.12-a). Deux régimes peuvent être mis en
évidence :
est
tracé pour différentes valeurs de l’énergie (Fig. 2.12-a). Deux régimes peuvent être mis en
évidence :
Le pendule admet deux points fixes correspondant aux positions d’équilibre stable et instable :
l’origine  est un point fixe elliptique et
est un point fixe elliptique et  est un point fixe
hyperbolique.
est un point fixe
hyperbolique.
La courbe en fréquence  est tracée pour
est tracée pour  , i.e. passant par le point
hyperbolique et y admet une singularité logarithmique. La période de rotation (Eq. 2.73) est alors
(voir par exemple Tabor, 1988 p. 11 sqq. et Laskar, 1993) :
, i.e. passant par le point
hyperbolique et y admet une singularité logarithmique. La période de rotation (Eq. 2.73) est alors
(voir par exemple Tabor, 1988 p. 11 sqq. et Laskar, 1993) :
 | (2.74) |
avec  , la fonction sinus elliptique de Jacobi :
, la fonction sinus elliptique de Jacobi :
 | (2.75) |
La courbe en fréquence  calculée pour
calculée pour  est identiquement nulle pour
est identiquement nulle pour  , car
la fréquence de circulation est nulle. Par contre au-delà, elle vaut
, car
la fréquence de circulation est nulle. Par contre au-delà, elle vaut  .
.
Ces deux courbes sont fondamentales, car elles décrivent le comportement de l’application
fréquence au voisinage d’une résonance (Laskar, 1993). La courbe  décrit son comportement
lorsqu’un point hyperbolique est traversé (Fig. 2.12-b), la courbe
décrit son comportement
lorsqu’un point hyperbolique est traversé (Fig. 2.12-b), la courbe  lorsqu’une île de
résonance est traversée (Fig. 2.12-c). Si l’on projette la courbe
lorsqu’une île de
résonance est traversée (Fig. 2.12-c). Si l’on projette la courbe  sur l’axe des fréquences, pour
un échantillonnage uniforme en
sur l’axe des fréquences, pour
un échantillonnage uniforme en  , l’allure de la courbe en fréquence ne dépend pas du
choix de
, l’allure de la courbe en fréquence ne dépend pas du
choix de  dans le régime libration (cf. courbes 2.12-d et 2.12-e et propriété (1) p. ).
Par contre l’échantillonnage est plus fin au voisinage de île de libration qu’au voisinage
du point hyperbolique, car la variation de la fréquence est plus rapide (cf. singularité
logarithmique).
dans le régime libration (cf. courbes 2.12-d et 2.12-e et propriété (1) p. ).
Par contre l’échantillonnage est plus fin au voisinage de île de libration qu’au voisinage
du point hyperbolique, car la variation de la fréquence est plus rapide (cf. singularité
logarithmique).
2.2.4.2 L’application d’Hénon
L’application d’Hénon (Hénon et Heiles, 1964 et Hénon, 1969) est la plus simple des
applications non triviales symplectiques polynomiales à deux degrés de liberté (Bazzani et al.,
p. 77) :
 | (2.76) |
où  et
et  sont des variables canoniques et
sont des variables canoniques et  est le nombre de rotation. Elle dérive du
Hamiltonien dépendant explicitement du temps
est le nombre de rotation. Elle dérive du
Hamiltonien dépendant explicitement du temps  :
:
 | (2.77) |
avec  la fonction de Dirac
la fonction de Dirac  -périodisée.
-périodisée.
Malgré sa simplicité, l’application d’Hénon contient une grande partie de la dynamique
nonlinéaire que nous rencontrerons dans les chapitres suivants. La partie quadratique du
Hamiltonien 2.77 modélise le mouvement bétatron perturbé par un hexapôle situé en  (cf.
Wiedemann, Tome II ou Lee, 1998). Je ne l’introduis ici que pédagogiquement pour illustrer les
propriétés de l’application fréquence énoncées dans la section 2.2.3 et également pour discuter des
résonances induites par une perturbation de type hexapolaire (pour plus de détails, voir le travail de
Bazzani, Todesco, Turchetti et Servizi, 1994).
(cf.
Wiedemann, Tome II ou Lee, 1998). Je ne l’introduis ici que pédagogiquement pour illustrer les
propriétés de l’application fréquence énoncées dans la section 2.2.3 et également pour discuter des
résonances induites par une perturbation de type hexapolaire (pour plus de détails, voir le travail de
Bazzani, Todesco, Turchetti et Servizi, 1994).
Dans ce cas, l’application fréquence est simplement définie par :
| FT : ℝ | → ℝ | |
|
| q |  ν ν | (2.78) |
Les portraits de phases de l’application d’Hénon sont tracés pour différentes valeurs
de la fréquence linéaire  et pour un nombre d’itérations
et pour un nombre d’itérations  (Fig. 2.14) et
mettent respectivement en évidence des résonances d’ordre 4, 5, 6 et 7 (cf. grands îlots de
résonance). Pour chacun des cas, la courbe en fréquence
(Fig. 2.14) et
mettent respectivement en évidence des résonances d’ordre 4, 5, 6 et 7 (cf. grands îlots de
résonance). Pour chacun des cas, la courbe en fréquence  pour
pour  et
et  est adjointe. C’est une courbe monotone de l’amplitude
est adjointe. C’est une courbe monotone de l’amplitude  excepté au voisinage des
résonances. L’étude de la régularité de
excepté au voisinage des
résonances. L’étude de la régularité de  révèlent également des résonances d’ordre plus
élevé.
révèlent également des résonances d’ordre plus
élevé.
Similairement au cas du pendule, lorsque  traverse une île, on observe un plateau, et au
voisinage d’un point hyperbolique une discontinuité de l’application fréquence. L’application
d’Hénon est suffisamment simple pour pouvoir calculer analytiquement la variation de
traverse une île, on observe un plateau, et au
voisinage d’un point hyperbolique une discontinuité de l’application fréquence. L’application
d’Hénon est suffisamment simple pour pouvoir calculer analytiquement la variation de  avec
avec  .
Pour cela, on écrit une forme normale de l’application d’Hénon au voisinage de l’origine qui est un
point fixe elliptique (voir Bazzani et al., 1994). Les largeurs de résonance peuvent aussi être
calculées et dépendent à la fois de
.
Pour cela, on écrit une forme normale de l’application d’Hénon au voisinage de l’origine qui est un
point fixe elliptique (voir Bazzani et al., 1994). Les largeurs de résonance peuvent aussi être
calculées et dépendent à la fois de  et de
et de  . A l’origine, on retrouve la fréquence linéaire,
i.e.
. A l’origine, on retrouve la fréquence linéaire,
i.e.  .
.
L’apparition de résonances de tout ordre sous l’action d’une perturbation, me permet d’introduire un
résultat général sur la dynamique d’un système Hamiltonien. En effet, d’après le théorème KAM (cf.
page ), nous avons vu que la majorité des trajectoires du système linéaire subsistent sous l’effet d’une faible
perturbation.
Par contre, tous les tores résonants sont détruits. La condition de résonance pour deux degrés de
liberté est :
 | (2.79) |
Ces orbites sont  -périodiques. Quel est le destin des tores résonants sous l’action d’une
perturbation ? Le théorème des points fixes de Poincaré-Birkhoff (voir par exemple, Arnold et Avez,
1968) stipule que le cercle d’orbites périodiques de fréquence rationnelle
-périodiques. Quel est le destin des tores résonants sous l’action d’une
perturbation ? Le théorème des points fixes de Poincaré-Birkhoff (voir par exemple, Arnold et Avez,
1968) stipule que le cercle d’orbites périodiques de fréquence rationnelle  pour le système
non perturbé dégénère en nombre paire (
pour le système
non perturbé dégénère en nombre paire ( ) points fixes :
) points fixes :  points fixes elliptiques alternés
avec
points fixes elliptiques alternés
avec  point fixes hyperboliques. Dans chacune des îles, ce schéma peut être appliqué de
nouveau au voisinage des orbites elliptiques (cf. Fig. 2.13).
point fixes hyperboliques. Dans chacune des îles, ce schéma peut être appliqué de
nouveau au voisinage des orbites elliptiques (cf. Fig. 2.13).
La notion de « dangerosité » d’une résonance pour la dynamique est un problème à part
entière. Par exemple, les résonances  et
et  conduisent toujours à des instabilités
quelque soit l’amplitude d’oscillation initiale
conduisent toujours à des instabilités
quelque soit l’amplitude d’oscillation initiale  : l’ouverture dynamique est nulle ; pour
: l’ouverture dynamique est nulle ; pour
 , la dynamique est toujours stable : l’ouverture dynamique est infinie. Pour toutes
les autres résonances, il existe une amplitude maximale non nulle (
, la dynamique est toujours stable : l’ouverture dynamique est infinie. Pour toutes
les autres résonances, il existe une amplitude maximale non nulle ( ) au-deçà de
laquelle le mouvement est stable. Au voisinage des points hyperboliques le mouvement est
chaotique mais borné. Par contre aux grandes amplitudes (
) au-deçà de
laquelle le mouvement est stable. Au voisinage des points hyperboliques le mouvement est
chaotique mais borné. Par contre aux grandes amplitudes ( ), les orbites résonantes
sont suffisamment excitées pour détruire toutes les trajectoires. La dernière trajectoire
fermée
définit l’ouverture dynamique qui est fortement marquée par les résonances (cf. Fig. 2.14 et
Fig. 2.15).
), les orbites résonantes
sont suffisamment excitées pour détruire toutes les trajectoires. La dernière trajectoire
fermée
définit l’ouverture dynamique qui est fortement marquée par les résonances (cf. Fig. 2.14 et
Fig. 2.15).
Ces résultats me permettent de rappeler, qu’un 2n-pôles peut engendrer des résonances de tout
ordre. En effet, il est parfois affirmé, par exemple, que les hexapôles ne peuvent générer que des
résonances d’ordre un et trois. Cette idée fausse provient du fait que si l’on applique une théorie de
perturbation du premier ordre, seules des résonances d’ordre inférieur à  apparaissent (voir par
exemple Hagedorn, 1957, Schoch, 1958 ou Guignard 1978) ; de plus, les calculs ne sont en
général pas faits aux ordres supérieurs (voir par exemple, Bazzani et al., 1994, Bengtsson,
1988).
apparaissent (voir par
exemple Hagedorn, 1957, Schoch, 1958 ou Guignard 1978) ; de plus, les calculs ne sont en
général pas faits aux ordres supérieurs (voir par exemple, Bazzani et al., 1994, Bengtsson,
1988).
2.2.5 Accélérateurs : carte en fréquence
2.2.5.1 Application fréquence
La première application de l’Analyse en Fréquence à l’étude de la dynamique des accélérateurs a
été effectuée sur des modèles de l’Advanced Light Source (Dumas et Laskar, 1993, Laskar et Robin,
1996).
Nous avons vu au cours du premier chapitre que la dynamique transverse d’un accélérateur est
modélisée par un système à (2+1) degrés de liberté, où le troisième degré de liberté provient de la
dépendance en longitude  du Hamiltonien global.
du Hamiltonien global.
L’Analyse en Fréquence se trouve être un outil particulièrement adapté à l’étude d’un tel
système. En effet, en adoptant les positions et moments canoniques usuelles,  ,
deux des conditions initiales peuvent être fixées, par exemple les moments
,
deux des conditions initiales peuvent être fixées, par exemple les moments  , pour un
jeu de conditions initiales
, pour un
jeu de conditions initiales  , la trajectoire de phase est intégrée numériquement et l’on
enregistre la trajectoire phase discrète
, la trajectoire de phase est intégrée numériquement et l’on
enregistre la trajectoire phase discrète  sur une section de Poincaré
pour une longitude
sur une section de Poincaré
pour une longitude  donnée, typiquement
donnée, typiquement  à chaque tour
à chaque tour  pendant un temps
d’intégration
pendant un temps
d’intégration  (Fig. 2.16). L’approximation quasi-périodique du signal
(Fig. 2.16). L’approximation quasi-périodique du signal  est
recherchée sous la forme (cf. page ) :
est
recherchée sous la forme (cf. page ) :
 | (2.80) |
avec  (resp.
(resp.  ),
),  le vecteur de fréquences fondamentales
qui correspond aux deux nombres d’ondes et à la fréquence de premier retour sur la surface de
Poincaré ;
le vecteur de fréquences fondamentales
qui correspond aux deux nombres d’ondes et à la fréquence de premier retour sur la surface de
Poincaré ;  un multi-indice et
un multi-indice et  .
.
L’application fréquence est alors de dimension deux :
Donc, si l’on choisit les positions  sur une grille de conditions initiales balayant par exemple
l’ensemble de l’ouverture physique de l’accélérateur, on va pouvoir construire une carte en
fréquence. Toute la puissance de l’Analyse en Fréquence pour un système à 3 degrés de liberté
repose sur le fait qu’une carte en fréquence dévoile la dynamique de manière exhaustive.
L’étude des cartes en fréquence que je présenterai dans le chapitre suivant révélera de
manière naturelle les principales résonances contraignant la dynamique transverse du
faisceau.
sur une grille de conditions initiales balayant par exemple
l’ensemble de l’ouverture physique de l’accélérateur, on va pouvoir construire une carte en
fréquence. Toute la puissance de l’Analyse en Fréquence pour un système à 3 degrés de liberté
repose sur le fait qu’une carte en fréquence dévoile la dynamique de manière exhaustive.
L’étude des cartes en fréquence que je présenterai dans le chapitre suivant révélera de
manière naturelle les principales résonances contraignant la dynamique transverse du
faisceau.
2.2.5.2 Principe de construction
Nous allons décrire la construction de la carte en fréquence de l’Advanced Light Source, carte qui a
la particularité d’être très simple à lire.
Pour chacune des conditions initiales  , la trajectoire de la particule est intégrée
numériquement sur
, la trajectoire de la particule est intégrée
numériquement sur  1 000 tours consécutifs. Ce nombre de tours est justifié par le temps
d’amortissement qui, pour l’ALS, est dix fois supérieur.
1 000 tours consécutifs. Ce nombre de tours est justifié par le temps
d’amortissement qui, pour l’ALS, est dix fois supérieur.
Si la particule a survécu (i.e. sa trajectoire n’a pas divergé), ses conditions initiales  appartiennent à l’ouverture dynamique. Les 1 000 premiers tours de l’intégration sont
utilisés pour calculer avec l’Analyse en Fréquence les nombres d’ondes
appartiennent à l’ouverture dynamique. Les 1 000 premiers tours de l’intégration sont
utilisés pour calculer avec l’Analyse en Fréquence les nombres d’ondes  . On
a ainsi obtenu le premier point de l’ouverture dynamique de l’ALS et de sa carte en
fréquence.
. On
a ainsi obtenu le premier point de l’ouverture dynamique de l’ALS et de sa carte en
fréquence.
Les 1 000 tours suivants servent à calculer de nouveau les nombres d’ondes  . Si
l’orbite n’est pas régulière les deux jeux de fréquences vont différer, car l’orbite aura diffusé. On
définit alors un indice de stabilité
. Si
l’orbite n’est pas régulière les deux jeux de fréquences vont différer, car l’orbite aura diffusé. On
définit alors un indice de stabilité  :
:
 | (2.82) |
La diffusion sera codée par des niveaux de gris ou des couleurs (Annexe B) à la fois sur la carte en
fréquence et sur l’ouverture dynamique. Cet indice se révèle être un excellent critère de stabilité à
long terme (voir le travail de Dumas et Laskar, 1993).
Ce processus de construction est réitéré pour chaque point de la grille de conditions initiales.
Puisque la première contribution au glissement des nombres d’ondes est quadratique,
 (cf. Eq. 1.76 page ), le choix le plus judicieux comme pas d’incrémentation des
conditions initiales est un pas suivant une loi en racine carrée (i.e. à choisir l’action). Ce qui nous
permet d’obtenir une détermination plus grossière de l’ouverture dynamique au voisinage du point
de fonctionnement mais beaucoup plus fine sur les bords de l’ouverture dynamique, i.e. là où
précisément les résonances limitent la stabilité du faisceau.
(cf. Eq. 1.76 page ), le choix le plus judicieux comme pas d’incrémentation des
conditions initiales est un pas suivant une loi en racine carrée (i.e. à choisir l’action). Ce qui nous
permet d’obtenir une détermination plus grossière de l’ouverture dynamique au voisinage du point
de fonctionnement mais beaucoup plus fine sur les bords de l’ouverture dynamique, i.e. là où
précisément les résonances limitent la stabilité du faisceau.
La carte en fréquence et l’ouverture dynamique de l’ALS sont données par la figure 2.17.
Le point de fonctionnement  est le coin supérieur droit de la
carte. Le bord supérieur (respectivement inférieur) de la carte correspond à la variation
des nombres d’ondes avec l’amplitude pour
est le coin supérieur droit de la
carte. Le bord supérieur (respectivement inférieur) de la carte correspond à la variation
des nombres d’ondes avec l’amplitude pour  à
à  (respectivement
(respectivement  à
à
 ).
).
Trois types de zones peuvent être distinguées sur la carte en fréquence (Fig. 2.17) :
-
les zones régulières
- (zones A) où les points de l’espace des fréquence sont régulièrement
espacés et caractérisés par une faible diffusion. Le mouvement est typiquement un
mouvement bétatron régulier.
-
les résonances
- (zones B) qui sont les droites de pente rationnelle,
 . Si
une résonance est traversée au voisinage d’une zone elliptique, on observe une droite
dans l’espace des fréquences (ce phénomène est renforcé pour une résonance isolée). Si
une résonance est traversée au voisinage d’une zone hyperbolique, il y a désertion de
points autour de la résonance.
. Si
une résonance est traversée au voisinage d’une zone elliptique, on observe une droite
dans l’espace des fréquences (ce phénomène est renforcé pour une résonance isolée). Si
une résonance est traversée au voisinage d’une zone hyperbolique, il y a désertion de
points autour de la résonance.
-
les zones chaotiques
- (zones C) où toute structure est perdue avec une diffusion élevée
et qui peut conduire à un comportement fortement nonlinéaire voire chaotique, par
exemple aux grandes amplitudes et sur les bords de l’ouverture dynamique.
Nous obtenons une bijection entre l’espace des configurations et l’espace des fréquences. Les
résonances peuvent être directement localisées sur l’ouverture dynamique. Dans cet espace
(Fig. 2.17-b), les régions complètement instables correspondent à celles sans points ; les résonances
ne sont pas des droites mais des « courbes » dont l’épaisseur est proportionnelle à la largeur de la
résonance.
- Pour une zone hyperbolique, la résonance est identifiée comme une courbe dont la
diffusion est localement plus élevée.
- Pour une région elliptique, les îles de la résonance correspondent à grande amplitude
non pas à une courbe mais à un ensemble de conditions initiales (voir Fig. 2.17-b).
Toutes les particules capturées dans l’île de résonance ont les mêmes fréquences.
Localement, il n’y a plus de bijection entre l’espace des fréquences et l’espace des
configurations. Ce phénomène est particulièrement marqué pour les résonances isolées
[sur la carte en fréquence] dont l’amplitude est très grande.
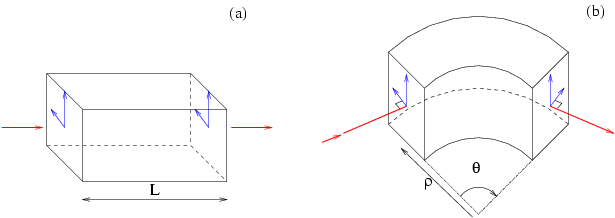
 . Les axes
de coordonnées sont portés par les faces d’entrée et de sortie des blocs — inspiré de Forest
et Hirata (1992) —
. Les axes
de coordonnées sont portés par les faces d’entrée et de sortie des blocs — inspiré de Forest
et Hirata (1992) —







 du correcteur pour les intégrateurs
du correcteur pour les intégrateurs  et
et  (extrait
de Laskar et Robutel, 2000)
(extrait
de Laskar et Robutel, 2000) 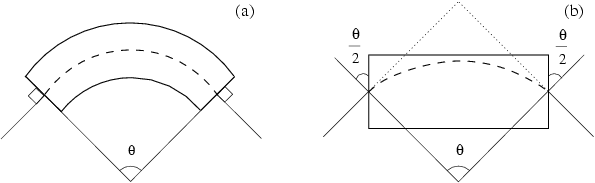
 .
.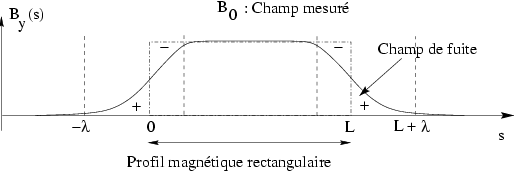
 . En
approximation
. En
approximation 

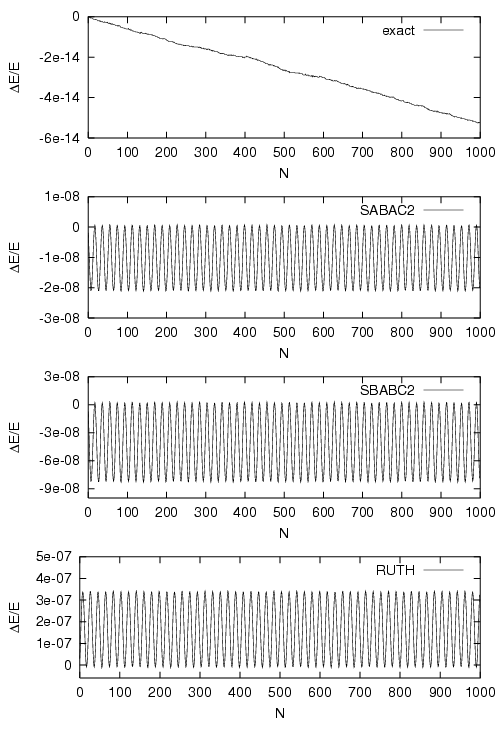
 ,
,  avec
correcteur et Ruth, pour un dipôle
combiné. Erreur sur l’énergie
avec
correcteur et Ruth, pour un dipôle
combiné. Erreur sur l’énergie  en
fonction du nombre
en
fonction du nombre  de passages dans
l’aimant. Pour les schémas symplectiques
l’erreur est bornée et périodique.
de passages dans
l’aimant. Pour les schémas symplectiques
l’erreur est bornée et périodique.
 . Les
intégrateurs
. Les
intégrateurs
 ,
,  avec correcteur sont
plus précis que l’intégrateur de Forest et
Ruth respectivement d’un ordre et d’un
demi ordre de grandeur.
avec correcteur sont
plus précis que l’intégrateur de Forest et
Ruth respectivement d’un ordre et d’un
demi ordre de grandeur.






 nécessaire d’itérations pour obtenir une solution
déphasée de
nécessaire d’itérations pour obtenir une solution
déphasée de  par rapport à l’intégration de référence d’une maille de l’ALS. Le
déphasage et le nombre d’ondes sont exprimés pour différentes valeurs du nombre
par rapport à l’intégration de référence d’une maille de l’ALS. Le
déphasage et le nombre d’ondes sont exprimés pour différentes valeurs du nombre  d’étapes
d’intégration. Le schéma
d’étapes
d’intégration. Le schéma  est à chaque fois plus précis de plus de un à deux ordres
de grandeur.
est à chaque fois plus précis de plus de un à deux ordres
de grandeur. 
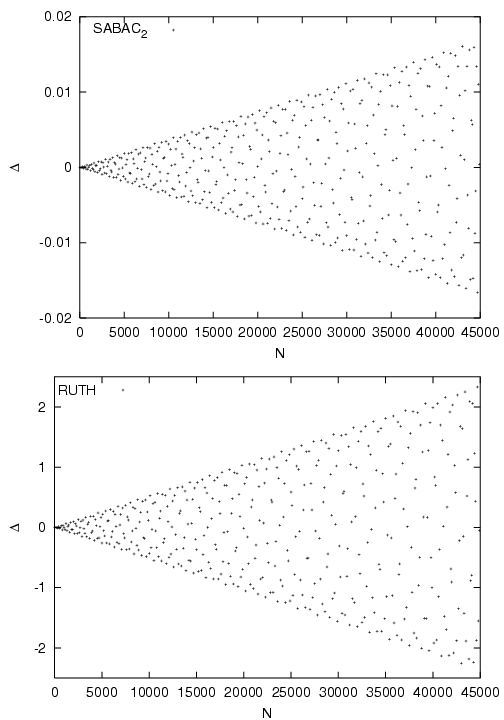
 des solutions du
dipôle combiné introduit par les schémas
des solutions du
dipôle combiné introduit par les schémas
 et de Ruth par rapport à
la solution « exacte ». Le déphasage est
inférieur de deux ordres de grandeur pour
la nouvelle classe d’intégrateur.
et de Ruth par rapport à
la solution « exacte ». Le déphasage est
inférieur de deux ordres de grandeur pour
la nouvelle classe d’intégrateur.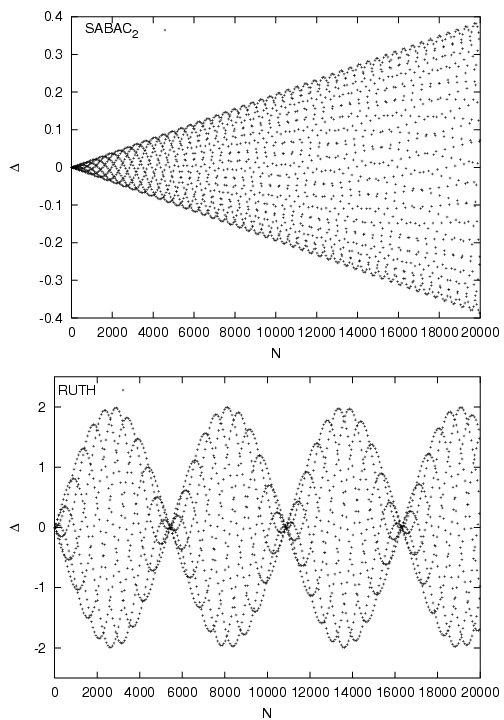
 tours de l’ALS. Les quadripôles et
dipôles sont intégrés en
tours de l’ALS. Les quadripôles et
dipôles sont intégrés en  étapes. Dès
5 441 tours, le schéma de Ruth introduit
un déphasage complet (remarquer la
différence d’échelle verticale pour les deux
méthodes).
étapes. Dès
5 441 tours, le schéma de Ruth introduit
un déphasage complet (remarquer la
différence d’échelle verticale pour les deux
méthodes).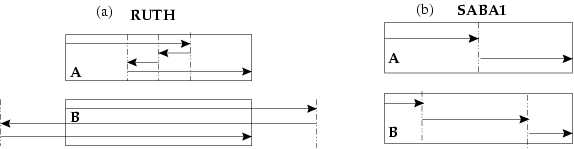
 et
et  d’un Hamiltonien avec (a)
l’intégrateur de Forest et Ruth et (b) l’intégrateur
d’un Hamiltonien avec (a)
l’intégrateur de Forest et Ruth et (b) l’intégrateur  .
.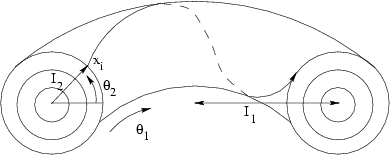
 . Les orbites (
. Les orbites ( ) sont confinées sur des tores de dimension 2.
) sont confinées sur des tores de dimension 2.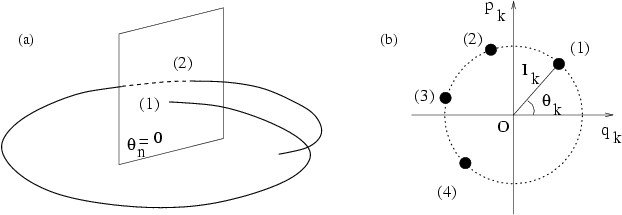
 . (b) Espace des phases
. (b) Espace des phases
 au temps (i).
au temps (i). 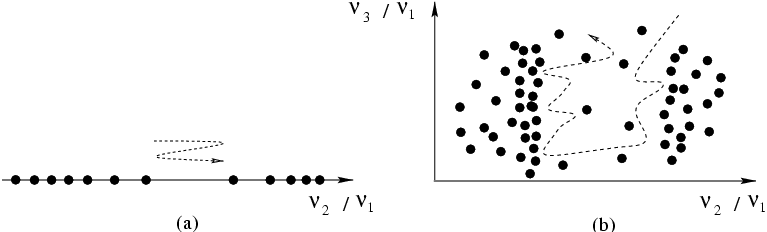
 ) où le pendule effectue des oscillations autour de l’origine de
période
) où le pendule effectue des oscillations autour de l’origine de
période
 ) est assez grande pour lui permettre
d’effectuer des mouvements de rotation de période
) est assez grande pour lui permettre
d’effectuer des mouvements de rotation de période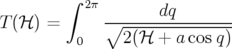

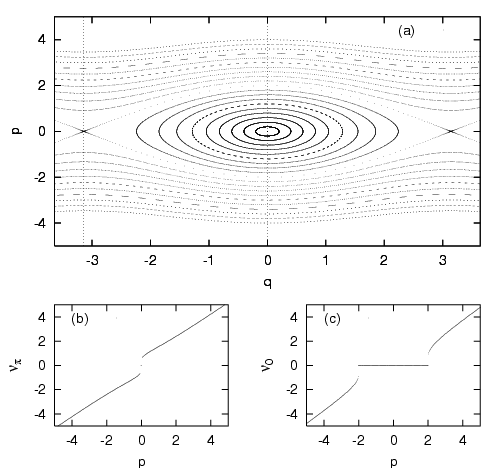

 du pendule rigide (a) et courbes en fréquence
du pendule rigide (a) et courbes en fréquence  .
Au voisinage du point hyperbolique (b), la courbe en fréquence présente une singularité
logarithmique. Au voisinage du point elliptique (c), la courbe en fréquence est nulle (plateau).
Après échantillonnage en moment
.
Au voisinage du point hyperbolique (b), la courbe en fréquence présente une singularité
logarithmique. Au voisinage du point elliptique (c), la courbe en fréquence est nulle (plateau).
Après échantillonnage en moment  , les projections (d et e) des courbes en fréquences sont
identiques pour le régime de circulation.
, les projections (d et e) des courbes en fréquences sont
identiques pour le régime de circulation. 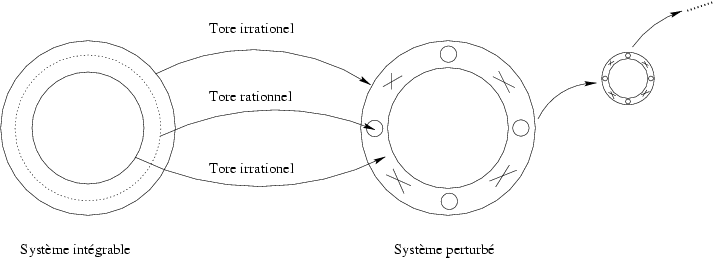
 en quatre points fixes elliptiques et quatre points fixes hyperboliques. Les tores irrationels
sont faiblement déformés. Au voisinage de chaque point elliptique, le raisonnement peut être
réappliqué.
en quatre points fixes elliptiques et quatre points fixes hyperboliques. Les tores irrationels
sont faiblement déformés. Au voisinage de chaque point elliptique, le raisonnement peut être
réappliqué. 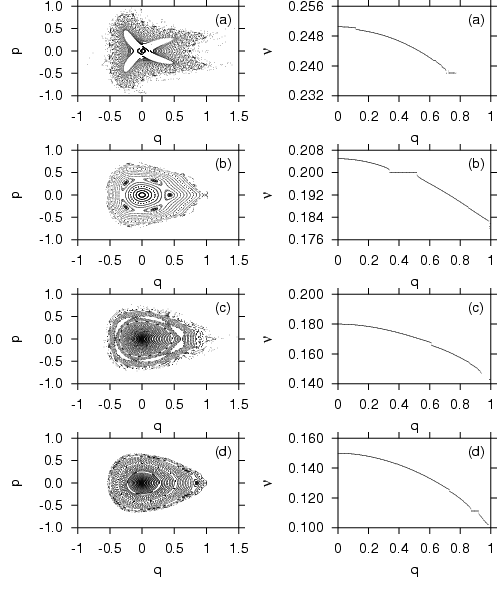
 et courbes en fréquence associées
et courbes en fréquence associées  pour
pour  de
l’application d’Hénon. La fréquence linéaire
de
l’application d’Hénon. La fréquence linéaire  a été choisie dans chacun des cas pour mettre
en évidence des résonances d’ordre 4 (a,
a été choisie dans chacun des cas pour mettre
en évidence des résonances d’ordre 4 (a,  ), 5 (b,
), 5 (b,  ), 6 (c,
), 6 (c,  )
et 7 (d,
)
et 7 (d,  ). Des résonances d’ordre plus élevé apparaissent et limitent l’ouverture
dynamique.
). Des résonances d’ordre plus élevé apparaissent et limitent l’ouverture
dynamique. 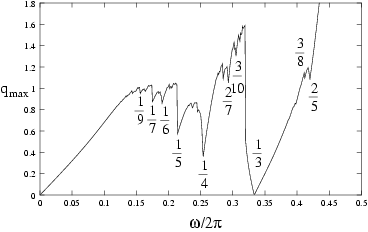
 ) associée à l’application d’Hénon en fonction de la
fréquence linéaire
) associée à l’application d’Hénon en fonction de la
fréquence linéaire  normalisée par
normalisée par  . L’ouverture dynamique est limitée par la résonance
entière pour
. L’ouverture dynamique est limitée par la résonance
entière pour  . Au-delà, elle est contrainte par des résonances d’ordre plus
élevé. L’ouverture dynamique est nulle pour
. Au-delà, elle est contrainte par des résonances d’ordre plus
élevé. L’ouverture dynamique est nulle pour  et
et 
 .
. 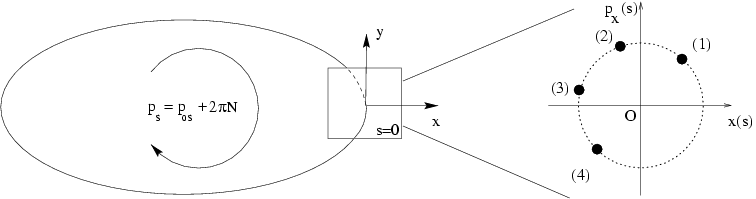
 pour un accélérateur de particules et trajectoire
de phase
pour un accélérateur de particules et trajectoire
de phase  enregistrée aux temps discrets
enregistrée aux temps discrets  .
. 
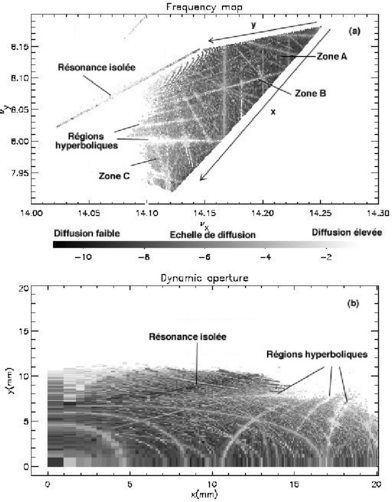
 (
( et
et  ). Trois
types de zones sont observés
). Trois
types de zones sont observés